智能車電磁檢測及控制算法的研究

摘要:在智能車傳統PID、PD控制的基礎上進行改進,提出了一種更為穩定快速的循跡控制方法。智能車的方向控制和速度控制都具有非線性、大滯后的特點,傳統的控制方法存在著響應時間不夠及穩態誤差大的缺點。通過電磁傳感器的合理設計,對路徑信息和車體狀態進行檢測,并在此基礎上引入基于模糊控制的變參數PD控制和變結構控制。實驗結果表明,與傳統方法相比,智能車運行的穩定性和快速性都得到了很大的提高。
關鍵詞:智能車;MC9S12XS128;模糊控制;變參數PD控制器;變結構控制器
本文是以第五屆“飛思卡爾”杯全國大學生智能汽車競賽為背景。本屆比賽新增加了電磁組的比賽,在50 cm寬的賽道中心鋪設有直徑0.1~0.3 mm的導線,其中通有20 kHz,100 mA的交變電流。除此之外,在賽道的起跑線處還有永磁鐵標志起跑線的位置。車模要通過自動識別導線所產生的電磁場進行路徑檢測。
從道路元素來看,賽道一般可以分成直道、轉彎、S道、回環道等形式。在智能車行駛的過程中,為了選擇最佳路徑,減少行駛距離,在轉彎處最好選擇內切,小S彎甚至可以近似的走成直線。但是由于電磁傳感器的局限性,不可能像攝像頭一樣檢測到前方賽道的全貌,這就要求在算法上有所突破。
1 智能車系統的硬件組成
1.1 整體硬件結構介紹
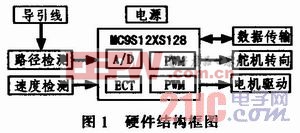
圖1所示為智能車控制系統的硬件框圖。系統采用飛思卡爾半導體公司的16位微處理器MC9S12XS128作為核心控制芯片,設計最小系統模塊;外圍電路包括路徑檢測模塊,速度檢測模塊,舵機轉向模塊,電機驅動模塊;電源模塊為整個系統提供動力支持。其中速度檢測模塊采用光電編碼器采集信號,并通過微控制器的ECT模塊進行脈沖捕捉計數,測得速度值;電機驅動采用H橋,可實現電機的正反轉及制動。
1.2 電磁傳感器的設計
根據麥克斯韋電磁場理論,交變電流會在周圍產生交變的電磁場。本智能車選用工字型10 mH電感作為磁場感應傳感器。這類電感體積小,Q值高,具有開放的磁芯,可以靈敏的感應周圍交變的磁場,產生響應感應電動勢。圖2所示為路徑檢測模塊電路圖,這里只為其中的一路。
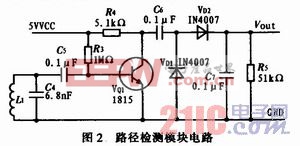
電路中L1為10 mH電感;C4為6.8 nF的諧振電容,實現20 kHz信號的選頻電路;Vout為感應電動勢輸出端。傳感器模塊伸出車體約10 cm,距離地面8 cm。
由畢奧-薩伐爾定律知,通有穩恒電流的直導線周圍會產生磁場,感應磁場分布是以導線為軸的一系列同心圓。圓上磁場強度大小相同,并隨著距離導線的徑增加成反比下降。
通電導線周圍的磁場是一個矢量場。在本設計中,根據法拉第電磁感應定律,感應電動勢可近似為:![]() 。k為比例系數,與線圈擺放方法、線圈面積和一些物理常量有關。感應電動勢的方向可用楞次定律來確定。對于放置在導線上方h處,與導線水平距離為x的線圈中產生的感應電動勢的大小與
。k為比例系數,與線圈擺放方法、線圈面積和一些物理常量有關。感應電動勢的方向可用楞次定律來確定。對于放置在導線上方h處,與導線水平距離為x的線圈中產生的感應電動勢的大小與![]() 成正比。θ是傳感器所在平面與導線的夾角。
成正比。θ是傳感器所在平面與導線的夾角。







評論