智能車電磁檢測及控制算法的研究

圖3所示為車模與賽道位置示意圖,車體前部即為路徑檢測模塊。α為車體相對于導線的偏移角度,d為車體相對于導線的偏離距離(垂直與車體中心線的橫向距離)。在車模行駛的過程中,每個電感線圈距離導線的距離不同,夾角也不同,因此輸出的感應電動勢大小不同。本文引用地址:http://www.104case.com/article/179065.htm
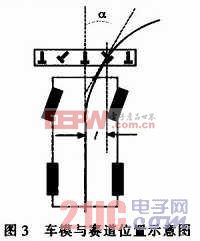
圖4所示為本設計中電磁傳感器的布局。每兩個軸線相互垂直的電感作為一組傳感器,水平放置。

設每組傳感器中,前端電感輸出的感應電動勢為Ey,后端電感輸出的感應電動勢為Ex,則:
1)對于1號位的兩個電感,計算![]() ,可求得電感所處磁場的導線方向,即車體相對于導線的偏移角度α;
,可求得電感所處磁場的導線方向,即車體相對于導線的偏移角度α;
2)2,3號位的電感同車體中心線成45°夾角,用來確定α值的正負,即導線所處的象限。當2號位檢測到的磁場強度明顯大于3號位時,以2號位前后兩個電感的電動勢之比![]() 作為方向的參考:當
作為方向的參考:當![]() 時,α為負(導線處于第二,四象限),
時,α為負(導線處于第二,四象限),![]() 時,α為正(導線處于第一,三象限);3號位的判別方法與之相反。
時,α為正(導線處于第一,三象限);3號位的判別方法與之相反。
3)計算1號位前后兩個電感感應電動勢平方和之根![]() ,再乘以比例系數λ,得到
,再乘以比例系數λ,得到![]() ,即為車體偏離導線的距離。
,即為車體偏離導線的距離。
4)4,5號位的電感用來輔助判斷d值的正負(左為負,右為正),方法同導線方向的判別類似。
由于實際賽道中磁導線的電流在50~100 mA之間,因此每次上電智能車都要有一個15 s的自學習的過程:將車體貼近賽道做左右擺動(不超出賽道范圍),檢測出不同的車體姿態下電感感應電動勢的極值,并由此確定值。實驗測得傳感器模塊距離的檢測精度為1.5 cm,角度的檢測誤差在±5°范圍內,前瞻距離可達到25 cm。實驗的結果表明,這樣的傳感器布局對于導線的檢測是比較準確的,而且它可以預測出導線的方向趨勢,便于前瞻性控制算法的設計。
2 整體控制系統的設計
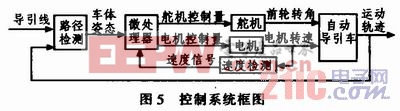
智能車的控制結構是以微處理器為核心。電機控制量、電機轉速和速度檢測構成一個閉環,該閉環的輸入為路徑檢測后微處理器給定的速度值,輸出控制后輪驅動;舵機控制量構成一個控制系統通道,其輸入為徽處理器給定的轉角值,輸出控制前輪轉向:最后以運動軌跡作為路徑檢測反饋控制器的輸入,其與導線比較確定車體姿態從而構成一個大的閉環控制系統。智能車的控制系統框圖如圖5所示。
3 轉向控制算法的設計
對舵機的控制,要保證在任何情況下,總能給舵機一個合適的偏移量,保證小車能始終連貫地沿導引線行駛,防止出現大的抖動。
舵機轉向是一個雙輸入單輸出的控制器:輸入量為偏移角度α及偏離距離d,輸出量為舵機的給定值。通過實驗得出,系統可以依靠單個輸入量來完成控制的舵機,譬如以偏移角度α作為輸入,不考慮偏離距離d的作用。這種情況下系統雖然能夠運行,但是控制的精度及響應速度較低。同樣,在僅依靠偏離距離d的時候,系統的穩定性較差,會出現比較明顯的抖動。因此,需要綜合分析這兩個輸入量之間的耦合關系,實現更為精確的控制。







評論