一種基于DSP芯片與CAN總線的電源監控系統設計

電源技術發展的方向之一是運用電源模塊并聯技術實現功率合成,組成積木式、智能化的分布式大功率電源系統。為使并聯的各個模塊協調工作,對分布式電源系統進行可靠的監控是電源技術發展的熱點之一。
本文引用地址:http://www.104case.com/article/177157.htm目前對分布式電源監控普遍采用的做法存在的問題主要在數字化程度不高,速度不夠快,精度和可靠性不夠高等問題,然而在工業控制中電源控制顯的十分的重要。
傳統電源系統并聯系統多是采用模擬的方法實現模塊間的電流均流的,但存在著一些共同的不足:必須有均流控制母線,需要增加專門的均流控制器。且均流母線屬于模擬電平信號線,抗干擾能力較弱;難于保證電源模塊調制頻率的一致。同時,當多個子并聯電源單元組成分布式電源系統時,對整個系統進行實時、準確的統一監控和調度意義重大。
電源監控實現的前提條件就是能在各子單元和監控單元之間通信,本系統設計就使用了在工業場合經常使用的具有存在自適應、自保護功能脆強,抗干擾能力強的CAN總線。
本系統由8塊控制單元和1塊中央監控單元組成。控制單元和監控單元之間通過CAN總線進行數據傳輸,各單元自成一個CAN節點。每個單元的核心處理器都是r11公司的TMS320F2812 DSP 芯片。每個控制單元有一個用戶而板與之對應。控制單元和面板完成每層電源模塊的電源參數采集,均流基準輸出,“遙/本采”及“遙,本調”切換,面板狀態信息顯示:中央監控單元完成對各層控制單元采集數據的實時匯總顯示以及對各層電源模塊的“遙調”,系統整體結構如圖1所示。
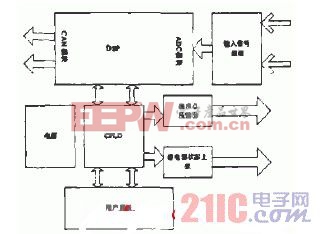
圖1系統控制單元結構圖
2 系統中央監控單元與外圍電路設計
中央監控單元可實現模塊信息的匯總顯示和對各層電源的“遙調”。各層控制單元采集和處理的數據經CAN總線傳送給中央監控單元。這些信息可以在OLED屏幕上分頁顯示,可接受來自鍵盤的操作自由選擇要顯示的信息。“遙調”值也是通過鍵盤輸入得到。本系統選用的處理器是TI公司的TMS320F2812,此處理器是一款32位定點數字信號處理器,處理速度可以達到150MIPS。該處理器還集成了128KB的Flash存儲器和128位的密碼保護機制,從而大大改善了應用的靈活性。同時片上還集成了16通道高性能12位ADC單元,提供了兩個采樣保持電路,可
以實現雙通道信號同步采樣,中央監控單元結構圖如圖2所示。
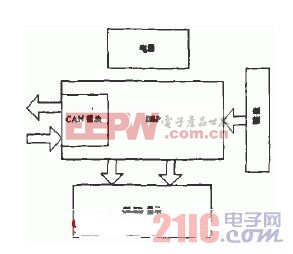
中央監控單元結構圖
2.1ADC模塊電路設計
TMS320F2812內部的ADC模塊是一個12位帶流水線的模數轉換器,模數轉換單元的模擬電路包括前向模擬多路復用開關(MUXs)、采樣/保持(S/H)電路、變換內核、電壓參考以及其他模擬輔助電路。模數轉換單元的數字電路包括可編程轉換序列器、結果寄存器、與模擬電路的接口、與芯片外設總線的接口以及其他片上模塊的接口,ADC模塊接線如圖3所示。
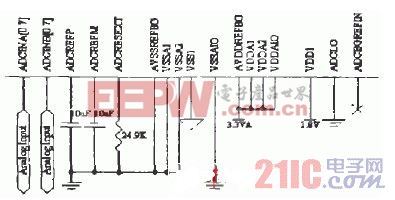
圖3 ADC模塊接線圖
2.2 eCAN模塊電路設計
CAN總線是一種多主串行通信方式,具有高級別的安全性,可以有效地支持分布式適時控制。CAN總線具有較強的抗干擾能力,可以在強噪聲干擾和惡劣工作環境中可靠的工作TMS320F2812的CAN控制器為DSP提供完整的CAN協議,減少了通信時的處理器開銷。eCAN模塊主要由CAN協議內核fCPK)和消息控制器構成。
CAN協議內核主要完成兩個功能:根據CAN協議對CAN總線上接收到的消息進行解碼,向接受緩沖發送解碼后的消息:CAN協議內核的另外一個功能是根據CAN協議在CAN總線上傳送消息。消息控制器對CAN協議內核接收到的消息進行判定,決定留給CPU使用還是丟棄,消息控制器還根據消息的極性將下一個消息發送到CAN協議內核(CPK)。CAN通信電路中,其中Rx和Tx分別是DSP的GPIOF7和GPIOF6引腳。上電初始它們默認為通用I/O引腳,通過軟件配置町實現為eCAN模塊接收和發送數據。
本系統使用的是德州儀器公司生產的SN65HVD2303.3V CAN收發器,該收發器具有一差分收發能力、斜率控制、具有一抗寬范圍的共模干擾、電磁干擾(EMI能力、高輸入阻抗和最多允許120個CAN節點等特點。SN65HVD230具有一高速、斜率和等待3種不同的工作模式。其工作模式控制可通過設置RS控制引腳來實現。
本設計中,考慮到信息的實時顯示和控制以及傳送的數據量較大且通信距離不長,為了提高信息的實時顯示和控制能力,故采用高速模式。把RS引腳接地。由于各個控制單元電氣上是隔離的,通過光隔把控制單元和CAN通信部分隔離開來。為了電平匹配,采用了LVTTL/LVCMOS兼容高速光隔,本設計采用Agilent公司的HCPL-260L。















評論