高精度無刷直流電機伺服控制系統的設計與仿真

3 系統與上位機的通訊
系統中用SCI接口完成與上位機的通訊功能,采用RS-232接口實現通信。通過上位機可以給定位置量,同時控制過程巾電機的速度、電流、位置反饋量等參數,也可以實時地發送給上位機顯示;SPI接口完成串行驅動數碼管顯示的功能。通過數字I/O擴展的鍵盤設定位置給定量,并由數碼管顯示。
4 系統仿真
本文對速度環采用增量式PID控制和參數自整定模糊PID控制兩種控制算法,利用北京雅合全公司生產的型號為45ZWN24-25的三相四極無刷直流電動機,對實驗結果進行分析。圖9、圖10分別對應兩種算法在電機啟動時的轉速響應曲線。
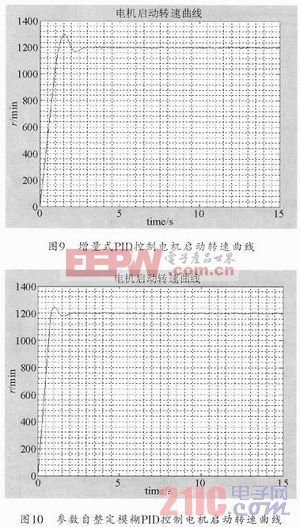
分析電機啟動時轉速啟動曲線可知,兩種控制箅法都有一定的超調,增量式PID控制算法電機啟動達到穩態的時間大約為2.8s,超調量為8.27%;而參數自整定模糊PID控制算法電機啟動達到穩態的時間大約為2.2s,超調量為4.58%,可見,采用參數自整定模糊PID控制算法之后,有效地降低了超調量,縮短了電機啟動的時間,提高了電機的控制精度。
5 結束語
本文設計了以TMS320F2812為核心的數字直流伺服系統,很好地解決了高精度伺服控制系統中PWM信號的生成、電機速度反饋及電機電流反饋問題,并實現了保護功能,使系統硬件得到了極大地簡化,提高了系統的可靠性。并結合參數自整定模糊PID控制算法實現了電機的高精度伺服控制,實驗結果驗證了陔方法的有效性。

霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
霍爾傳感器相關文章:霍爾傳感器原理









評論