高精度無刷直流電機伺服控制系統的設計與仿真

摘要:為提高伺服系統中無刷直流電機的控制效果,設計了以DSP為核心的無刷直流電機控制系統方案。本控制系統的主要優勢在于利用數字信號處理器的高速實時運算處理功能,易于實現各種高效的控制算法,很好地解決了伺服系統中PWM信號的生成、電動機速度反饋和電流反饋等問題。并結合模糊控制算法進行了仿真研究,達到無刷直流電機的高精度伺服控制的目的。
關鍵詞:無刷直流電機;DSP;PWM控制;Sinmulink仿真
在伺服傳動系統中,無刷直流電動機(BLDCM)是一種新型的無級變速電動機,其結構簡單可靠、維護方便、運行效率高及慣量小和控制精度高等優點,廣泛應用于伺服控制精密數控機床、加工中心、機器人等領域。隨著BLDCM應用領域的推廣,對系統的動靜態性能、魯捧性、控制精度等要求越來越高。
本文以三相四極無刷直流電動機為研究對象,結合PID控制和模糊控制各自的優勢,設計了一套基于TI公司的C2000系列TMS320F2812 DSP為核心的全數字永磁無刷直流電動機的閉環調速系統,以期滿足BLDCM伺服控制系統的高精度、快速性、穩定性和魯捧性的要求。
1 總體方案設計
系統沒計采用三相四極無刷直流電動機PWM控制方案,逆變橋的通電方式采用兩兩導通方式該系統主要由三相四極無刷直流電動機、控制器、電子開關電路和化置檢測器四部分組成。其結構框圖如圖1所示。

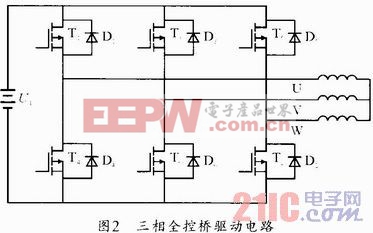
功率驅動方式采用三相Y型全橋驅動電路,如圖2所示。本系統實現的關鍵就是通過位置環、速度環和電流環三閉環結構最終實現位置的伺服控制。從閉環結構上看,位置環在最外面,是本系統的主環,電流調節環和速度調節環在里面,兩者都是為位置環而服務,電流調節器和速度調節器采用PI調節器,位置調節器采用PID調節器,以TMS320F2812微控制器為控制核心,以功率MOSFET管構成逆變器。通過改變逆變器開關器件的PWM占空比來改變電機電楸端電壓,以實現電機轉速的調節。
2 硬件設計
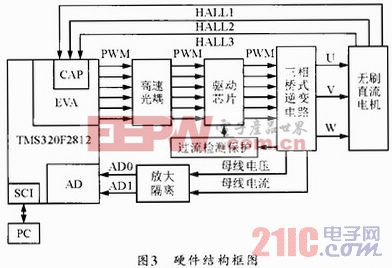
圖3給出了基于TMS320F2812 DSP的無刷直流電機控制系統硬件結構框圖。

霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
霍爾傳感器相關文章:霍爾傳感器原理









評論