ADC0809A/D轉(zhuǎn)換芯片的原理及應(yīng)用

ADC0809是帶有8位A/D轉(zhuǎn)換器、8路多路開關(guān)以及微處理機(jī)兼容的控制邏輯的CMOS組件。它是逐次逼近式A/D轉(zhuǎn)換器,可以和單片機(jī)直接接口。
本文引用地址:http://www.104case.com/article/172275.htm(1)ADC0809的內(nèi)部邏輯結(jié)構(gòu)
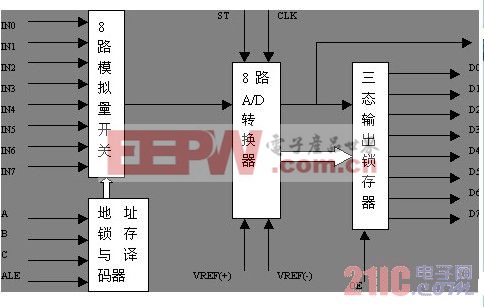
由上圖可知,ADC0809由一個(gè)8路模擬開關(guān)、一個(gè)地址鎖存與譯碼器、一個(gè)A/D轉(zhuǎn)換器和一個(gè)三態(tài)輸出鎖存器組成。多路開關(guān)可選通8個(gè)模擬通道,允許8路模擬量分時(shí)輸入,共用A/D轉(zhuǎn)換器進(jìn)行轉(zhuǎn)換。三態(tài)輸出鎖器用于鎖存A/D轉(zhuǎn)換完的數(shù)字量,當(dāng)OE端為高電平時(shí),才可以從三態(tài)輸出鎖存器取走轉(zhuǎn)換完的數(shù)據(jù)。
(2) 引腳結(jié)構(gòu)
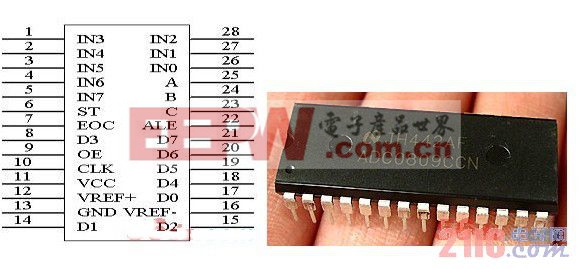
IN0-IN7:8條模擬量輸入通道
ADC0809對(duì)輸入模擬量要求:信號(hào)單極性,電壓范圍是0-5V,若信號(hào)太小,必須進(jìn)行放大;輸入的模擬量在轉(zhuǎn)換過程中應(yīng)該保持不變,如若模擬量變化太快,則需在輸入前增加采樣保持電路。
地址輸入和控制線:4條
ALE為地址鎖存允許輸入線,高電平有效。當(dāng)ALE線為高電平時(shí),地址鎖存與譯碼器將A,B,C三條地址線的地址信號(hào)進(jìn)行鎖存,經(jīng)譯碼后被選中的通道的模擬量進(jìn)轉(zhuǎn)換器進(jìn)行轉(zhuǎn)換。A,B和C為地址輸入線,用于選通IN0-IN7上的一路模擬量輸入。通道選擇表如下表所示。

數(shù)字量輸出及控制線:11條
ST為轉(zhuǎn)換啟動(dòng)信號(hào)。當(dāng)ST上跳沿時(shí),所有內(nèi)部寄存器清零;下跳沿時(shí),開始進(jìn)行A/D轉(zhuǎn)換;在轉(zhuǎn)換期間,ST應(yīng)保持低電平。EOC為轉(zhuǎn)換結(jié)束信號(hào)。當(dāng)EOC為高電平時(shí),表明轉(zhuǎn)換結(jié)束;否則,表明正在進(jìn)行A/D轉(zhuǎn)換。OE為輸出允許信號(hào),用于控制三條輸出鎖存器向單片機(jī)輸出轉(zhuǎn)換得到的數(shù)據(jù)。OE=1,輸出轉(zhuǎn)換得到的數(shù)據(jù);OE=0,輸出數(shù)據(jù)線呈高阻狀態(tài)。D7-D0為數(shù)字量輸出線。
CLK為時(shí)鐘輸入信號(hào)線。因ADC0809的內(nèi)部沒有時(shí)鐘電路,所需時(shí)鐘信號(hào)必須由外界提供,通常使用頻率為500KHZ,
VREF(+),VREF(-)為參考電壓輸入。
2. ADC0809應(yīng)用說明
(1). ADC0809內(nèi)部帶有輸出鎖存器,可以與AT89S51單片機(jī)直接相連。
(2). 初始化時(shí),使ST和OE信號(hào)全為低電平。
(3). 送要轉(zhuǎn)換的哪一通道的地址到A,B,C端口上。
(4). 在ST端給出一個(gè)至少有100ns寬的正脈沖信號(hào)。
(5). 是否轉(zhuǎn)換完畢,我們根據(jù)EOC信號(hào)來判斷。
(6). 當(dāng)EOC變?yōu)楦唠娖綍r(shí),這時(shí)給OE為高電平,轉(zhuǎn)換的數(shù)據(jù)就輸出給單片機(jī)了。
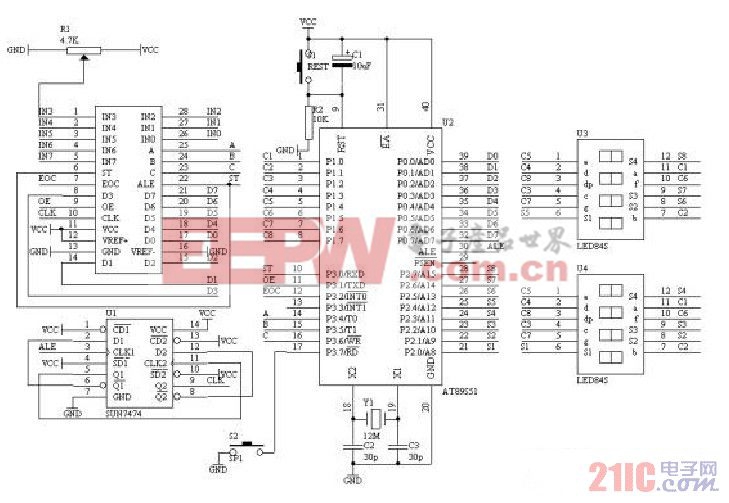
3. 實(shí)驗(yàn)任務(wù)
如下圖所示,從ADC0809的通道IN3輸入0-5V之間的模擬量,通過ADC0809轉(zhuǎn)換成數(shù)字量在數(shù)碼管上以十進(jìn)制形成顯示出來。ADC0809的VREF接+5V電壓。
4. 電路原理圖
6. 程序設(shè)計(jì)內(nèi)容
(1). 進(jìn)行A/D轉(zhuǎn)換時(shí),采用查詢EOC的標(biāo)志信號(hào)來檢測A/D轉(zhuǎn)換是否完畢,若完畢則把數(shù)據(jù)通過P0端口讀入,經(jīng)過數(shù)據(jù)處理之后在數(shù)碼管上顯示。
(2). 進(jìn)行A/D轉(zhuǎn)換之前,要啟動(dòng)轉(zhuǎn)換的方法:
ABC=110選擇第三通道
ST=0,ST=1,ST=0產(chǎn)生啟動(dòng)轉(zhuǎn)換的正脈沖信號(hào)
7. 匯編源程序
CH EQU 30H
DPCNT EQU 31H
DPBUF EQU 33H
GDATA EQU 32H
ST BIT P3.0
OE BIT P3.1
EOC BIT P3.2
ORG 00H
LJMP START
ORG 0BH
LJMP T0X
ORG 30H
START: MOV CH,#0BCH
MOV DPCNT,#00H
MOV R1,#DPCNT
MOV R7,#5
MOV A,#10
MOV R0,#DPBUF
LOP: MOV @R0,A
INC R0
DJNZ R7,LOP
MOV @R0,#00H
INC R0
MOV @R0,#00H
INC R0
MOV @R0,#00H
MOV TMOD,#01H
MOV TH0,#(65536-4000)/256
MOV TL0,#(65536-4000) MOD 256
SETB TR0
SETB ET0
SETB EA
WT: CLR ST
SETB ST
CLR ST
WAIT: JNB EOC,WAIT
SETB OE
MOV GDATA,P0
CLR OE
MOV A,GDATA
MOV B,#100
DIV AB
MOV 33H,A
MOV A,B
MOV B,#10
DIV AB
MOV 34H,A
MOV 35H,B
SJMP WT
T0X: NOP
MOV TH0,#(65536-4000)/256
MOV TL0,#(65536-4000) MOD 256
MOV DPTR,#DPCD
MOV A,DPCNT
ADD A,#DPBUF
MOV R0,A
MOV A,@R0
MOVC A,@A+DPTR
MOV P1,A
MOV DPTR,#DPBT
MOV A,DPCNT
MOVC A,@A+DPTR
MOV P2,A
INC DPCNT
MOV A,DPCNT
CJNE A,#8,NEXT
MOV DPCNT,#00H
NEXT: RETI
DPCD: DB 3FH,06H,5BH,4FH,66H
DB 6DH,7DH,07H,7FH,6FH,00H
DPBT: DB 0FEH,0FDH,0FBH,0F7H
DB 0EFH,0DFH,0BFH,07FH
END
8. C語言源程序
#include AT89X52.H>
unsigned char code dispbitcode[]={0xfe,0xfd,0xfb,0xf7,
0xef,0xdf,0xbf,0x7f};
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00};
unsigned char dispbuf[8]={10,10,10,10,10,0,0,0};
unsigned char dispcount;
sbit ST=P3^0;
sbit OE=P3^1;
sbit EOC=P3^2;
unsigned char channel=0xbc;//IN3
unsigned char getdata;
void main(void)
{
TMOD=0x01;
TH0=(65536-4000)/256;
TL0=(65536-4000)%256;
TR0=1;
ET0=1;
EA=1;
P3=channel;
while(1)
{
ST=0;
ST=1;
ST=0;
while(EOC==0);
OE=1;
getdata=P0;
OE=0;
dispbuf[2]=getdata/100;
getdata=getdata%10;
dispbuf[1]=getdata/10;
dispbuf[0]=getdata%10;
}
}
void t0(void) interrupt 1 using 0
{
TH0=(65536-4000)/256;
TL0=(65536-4000)%256;
P1=dispcode[dispbuf[dispcount]];
P2=dispbitcode[dispcount];
dispcount++;
if(dispcount==8)
{
dispcount=0;
}
}










評(píng)論