感應式循跡小車的設計與實現

3 循跡小車的程序設計
3. 1 總體設計思路
在循跡小車運行過程中,不斷讀取P3口的狀態值,取出高4位,將結果存入累加器A中,然后用查表的方法,取出對應的組合參數表值,在讀出的表值中,高4位為控制電動機運行的參數,低4位為電機運行的延時參數,把高4位和低4位數從字節中分離出來,將高4位數送入P2口對循跡小車運動狀態進行控制,將低4位值賦予延時子程序的R0,延時時間為R0×T(ms),T是單位時間,需根據循跡小車的速度性能確定,用以控制各運行狀態的運行時間。另外,在循跡小車尋跡過程中,常會出現循跡小車出軌的情況,一旦循跡小車脫離尋跡軌道,往往意味著尋跡失敗,因此需在程序中增加挽救措施,讓循跡小車在發現自已脫軌后,立即后退,回到軌道線繼續運行。根據以上設計思路,循跡小車的控制流程圖如圖5所示。本文引用地址:http://www.104case.com/article/172195.htm

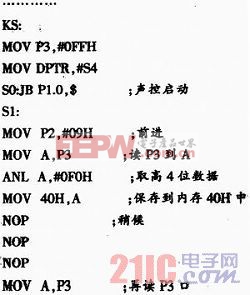
3.2 主要匯編程序實現

4 結論
為提高傳統循跡小車的運行可靠性,文章提出感應式循跡小車的設計方法,且詳細地闡述了該設計的主婁組成:循跡小車的硬件及電路、循跡小車的循跡控制和單片機的程序實現。
按照本文所提出的新方法,作者成功地設計和制作了感應式循跡小車的樣品,樣品實際測試結果表明:基于新方法設計的小車運行平穩,在長時間工作中沒有出現脫軌現象,循跡小車的運行與環境光的強弱沒有關系,小車的整體性能較好。

倍壓整流電路相關文章:倍壓整流電路原理









評論