感應式循跡小車的設計與實現

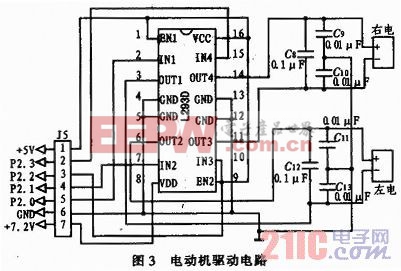
1.3 電動機驅動電路
機器人采用兩個減速電動機分別帶動左右兩個動力輪,實現前進、后退、轉彎等功能。電動機的驅動電路選用小直流電動機專用驅動芯片L293D,它能同時驅動2個減速電機,最大輸出峰值電流達1 A,該芯片與單片機連接如圖3所示。本文引用地址:http://www.104case.com/article/172195.htm
2 循跡小車的尋跡控制
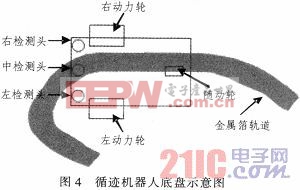
2.1 傳感器的位置
感應式循跡小車底盤結構如圖4,底盤左右兩輪都為動力輪,分別由兩個減速電動機驅動,后面的小輪為隨動輪,隨著兩個動力輪的運行而運行。3個金屬感應傳感器的電感線圈并排安裝在機器人的前面,距地面約5毫米左右的距離,正常運行時,讓中間的一個傳感器位于道路的正上方,處于檢測到金屬物體的狀態,傳感器輸出為0電平,旁邊兩個傳感器在道路兩邊,沒有檢測到金屬物體,輸出為1電平,3個傳感器的輸出端與單片機對應端口連接,電平輸出信號就是單片機端口的輸入信號。

倍壓整流電路相關文章:倍壓整流電路原理









評論