基于CAN總線的電動汽車數字控制系統研究

系統軟件模塊包括:控制策略模塊、系統參數配置模塊、運行監控及故障指示模塊、CAN通信總線模塊、數據采集模塊、配置數據交換模塊、報表打印模塊、與其他軟件的接口模塊等。其中控制策略模塊和CAN總線通信模塊是主要的功能模塊。
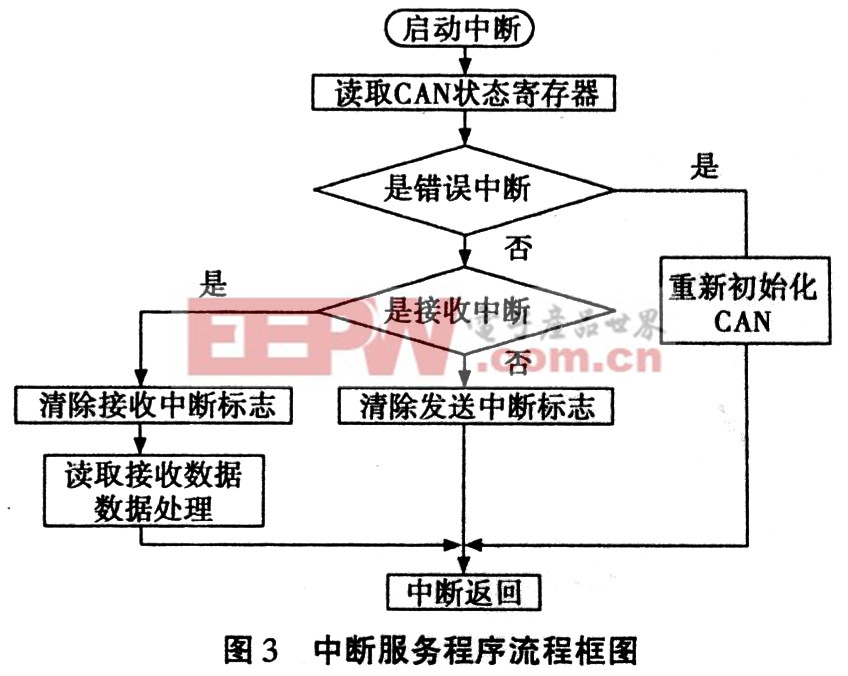
由于控制器是多變量輸入,為了適應控制對象結構和參數變化范圍大、對象數學模型難于建立的特點,控制策略模塊采用了模糊控制方法。模糊控制的基礎是知識庫,當各個節點的信息通過CAN總線輸入到控制器后,經過模糊推理和模糊決策獲得輸出量,可使整車獲得最佳運行狀態,實現電動汽車儀表顯示及優化控制。CAN總線通信軟件主要包括節點初始化程序、報文發送程序、報文接收程序以及CAN總線出錯處理程序等。在初始化C8051F040內部寄存器時注意使得各節點的速率必須一致,而且收、發雙方必須同步。報文的接收主要有中斷和查詢兩種接收方式,為提高通信的實時性,保證接收緩存器不會出現數據溢出現象,本文設計的系統采用中斷接收方式實現CAN的通信過程。中斷服務程序流程圖如圖3所示。本文引用地址:http://www.104case.com/article/163824.htm
數據采集系統通過傳感器、信號調理電路和采集卡,將表征電動汽車運行狀況的物理量轉化為數字量采集至各個CAN節點,在對數據位值轉換、軟件濾波和必要運算后,通過CAN總線將信息送往多能源控制器。CAN節點控制模
塊需要采集的主要信號有:
1)動力裝置的冷卻系統:檢測水溫、油溫、油壓力、啟動故障、水溫過高/低等;
2)電機驅動控制系統:檢測電壓、電流扭矩、功率、轉速、電機狀態、車速、電機故障、加速踏板位置、制動踏板位置、離合器狀態、鑰匙信號、檔位等;
3)電池管理系統:檢測SOC、電池電壓、電池電流、電池溫度、電池充/放電、電池故障等。
現場總線控制系統以其高性能、高可靠性和高性價比,被越來越多地應用于車用電控單元和儀表系統之中。在電動汽車控制系統中采用CAN總線技術,不僅組網自由,擴展性強,實時性好,可靠性高,而且具有自診斷和監控能力,它是一種十分有效的通信方式。
5 結論
本文介紹了基于單片機C8051F040的CAN電動汽車數字控制系統設計過程,給出了硬件系統結構圖和軟件設計思路,經過實驗證明,CAN電動汽車數字控制系統工作穩定、可靠,具有良好的應用前景。










評論