基于STCl2C5410AD的電動車無刷電機控制器檢測

2.3 控制器角度與相序的判斷
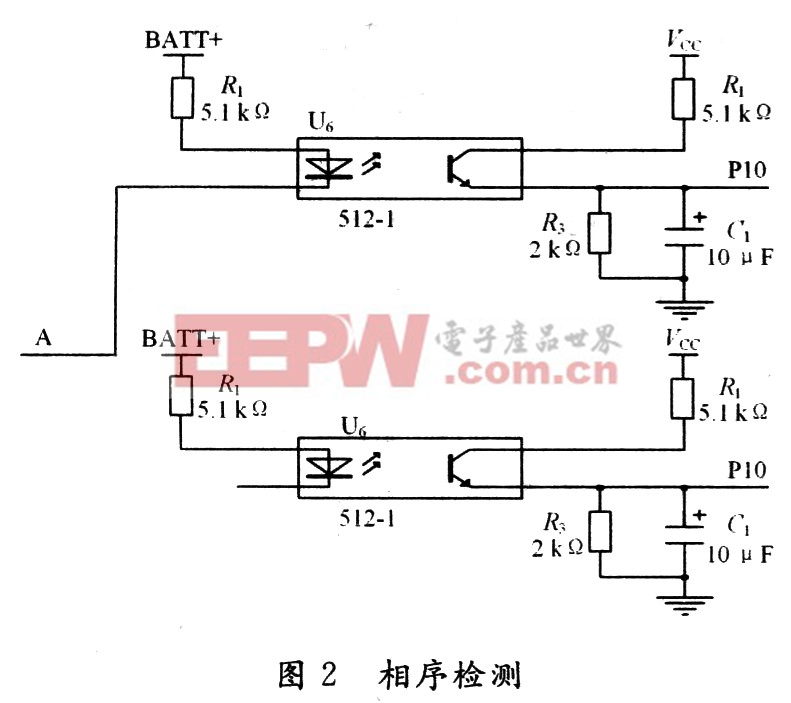
如圖2所示,首先判斷繞組電壓A的輸出,將兩個光藕合器連到控制器的末級,與A的上下管并聯起來,當A的上管導通時,A輸出高電壓,使下面的光耦導通。從而輸出一個電壓值,通過STCl2C5410AD單片機的A/D轉換端P11口送到單片機中;當A的下管導通時,A輸出低電壓,使上面的光耦導通,從而輸出一個電壓值,通過STCl2C5410AD單片機的A/D轉換端P10口送到單片機中。B和C用上面同樣的接法。在輸出時沒有直接輸出,而是通過光耦隔離后才輸出,原因如下:光耦合器的信號單向傳輸,輸入端與輸出端完全實現了電氣隔離,輸出信號對輸入端無影響,抗干擾能力強、工作穩定、無觸點、使用壽命長、傳輸效率高。本文引用地址:http://www.104case.com/article/163102.htm
3 系統軟件設計
3.1 總體設計流程圖
總體設計流程圖如圖3所示。
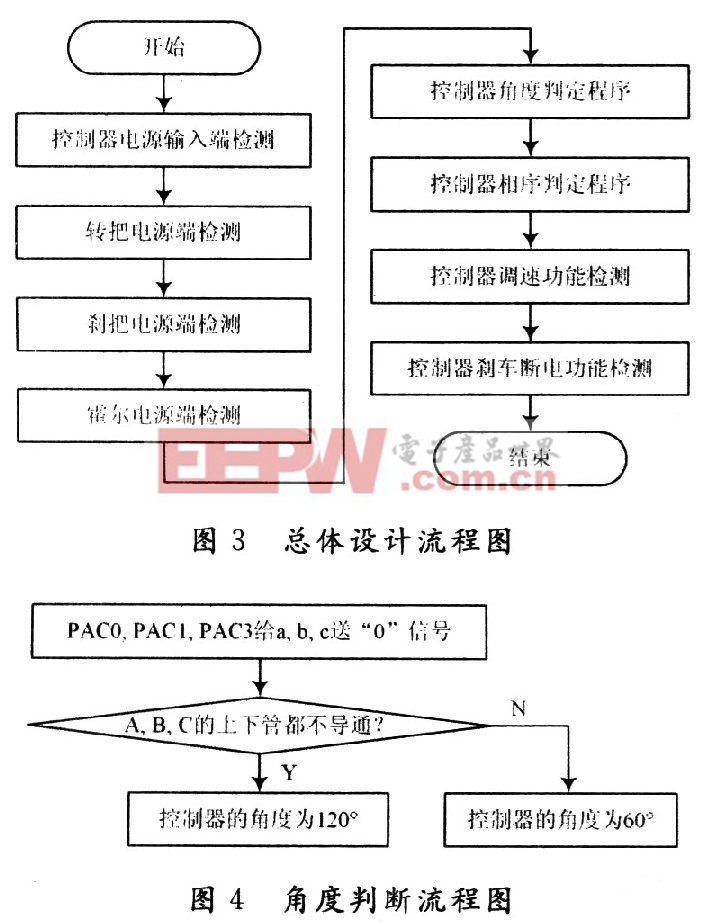
測量控制器輸入端阻抗,當其大于10 Ω時為正常,否則電源輸入端短路。轉把、剎把、霍爾電源端的檢測要保證輸出電壓大于4.5 V。控制器角度和相序的判斷根據無刷真值表進行判斷和檢測,以下僅以控制器角度判斷為例進行說明。
3.2控制器角度判斷程序設計
由表1可以看出當a,b,c都取“0”,控制器角度為120°的時候,A,B,C上下管都不導通;而控制器為60°時A的上管和B的下管導通,這樣便能根據a,b,c都取“0”時,A,B,C的輸出信號來判斷控制器的角度。流程圖如圖4所示。

4 結語
系統設計采用STCl2C5410AD單片機作為控制芯片,電路簡單,測量精確,很好地滿足了電動車無刷電機控制器檢測的各項需求,能夠檢測控制器接轉把和剎把端是否正常,能夠判斷控制器的角度,霍爾控制相序以及與其對應的電機電源相序是否一致。希望該設計在將來的應用中得到更好的改進和完善。











評論