基于XC866的PWM直流無刷電機的正弦波控制

采用開關損耗最小正弦PWM控制BLDC時,電機端線電壓與霍爾傳感器輸出之間的關系示意圖如圖6。
本文引用地址:http://www.104case.com/article/162826.htm
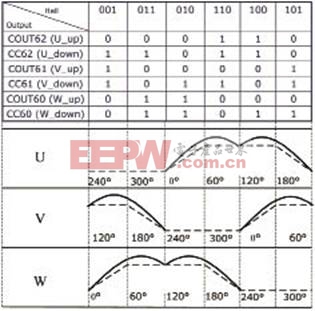
圖6 采用開關損耗最小正弦PWM時,端線電壓與霍爾狀態的關系
由圖2可知,采用開關損耗最小正弦PWM時電機端線電壓超前于相電壓30°,因此可得采用正弦波控制時電機相電壓與反電勢同步。
由于相電壓超前于相電流,因此相電流滯后于反電勢。
轉速計算
轉速計算依賴于霍爾傳感器,理想狀態下相鄰兩個霍爾狀態的間隔為60°,實際應用中由于存在安裝誤差,實際間隔并非60°,會引入計算誤差。本文檔中采用一個霍爾傳感器的輸出作為轉速計算參考,如圖7所示。其中高低電平分別為180度,不會引入安裝誤差。利用此信息即可計算電機轉速。
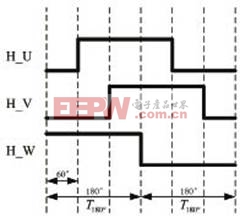
圖7 轉速計算
計算公式如下:![]() 。其中:f為電頻率,P為電機極對數
。其中:f為電頻率,P為電機極對數
角度估算
與方波控制不同,正弦波控制中角度為連續變化,而BLDC中常見的3個霍爾傳感器僅僅能提供6個角度信息,即0°,60°,120°,180°,240°,300°,其他角度信息無法直接獲得。通常采用平均速度法,假設在一定時間內電機速度平穩,利用前次霍爾換相時的角度與速度信息插值得到其他角度信息,如圖8所示。
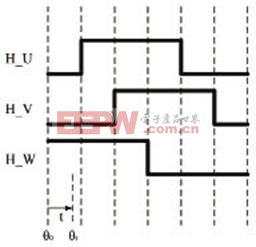
圖8 角度估算![]() ,由此可見電機的轉速波動將直接影響角度計算的誤差,在方案中利用相鄰3次180°換相時間的平均值來計算轉速信息,如圖9。
,由此可見電機的轉速波動將直接影響角度計算的誤差,在方案中利用相鄰3次180°換相時間的平均值來計算轉速信息,如圖9。
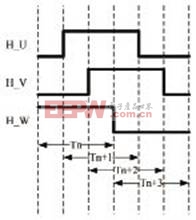
圖9 多次平均法計算轉速

pwm相關文章:pwm原理










評論