基于XC866的PWM直流無刷電機的正弦波控制

其中Ux、Uy、Uz為電機端線電壓,Ua、Ub、Uc為電機相電壓,可見相電壓相位差為120度。Ux、Uy、Uz與Ua、Ub、Uc的關系如下:


合并后,Ux,Uy,Uz如下:
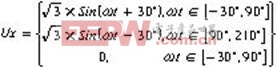

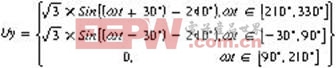
可見采用開關損耗最小正弦PWM時,Ux,Uy,Uz相位差120度,且為分段函數形式,并非正弦電壓,而電機相電壓Ua、Ub、Uc仍然為正弦電壓。且在120度區內端線電壓為0,即對應的開關管常開或常關。因此與三相正弦PWM相比,開關損耗減少1/3。
通過控制Ux,Uy,Uz的相位以及幅值即可以控制Ux,Uy,Uz,實現控制電流的目的。
直流無刷電機簡易正弦波控制的實現
系統結構
系統結構如圖4所示。工作原理如下:霍爾輸入信號經過自動濾波及采樣處理,得到可靠的換相信號,此信息可被用作估算轉子角度以及轉速。速度PI調解器根據給定轉速值以及反饋轉速值計算正弦PWM的Modulation的大小。位置估算單元利用轉速以及換相信息估算轉子位置角Angle。通過超前角調整單元,補償超前角Δ,得到Angle。SPWM單元利用Modulation 以及Angle信息生成開關損耗最小SPWM,輸出到逆變單元。以下內容介紹了各單元原理及實現。
本文引用地址:http://www.104case.com/article/162826.htm
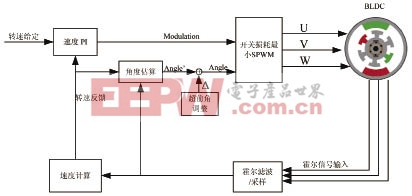
圖4 系統框圖
開關損耗最小正弦PWM的生成
由于Ux,Uy,Uz相位相差120度,因此以Ux為例進行分析。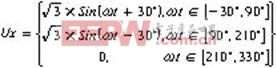
Ux為分段函數,![]() 與
與![]() 為正弦函數且以
為正弦函數且以![]() 對稱。僅需實現其中一段,另一段對稱處理即可。
對稱。僅需實現其中一段,另一段對稱處理即可。![]() 的實現:
的實現:![]()
因此僅需要利用0-120度的正弦表即可以實現,即![]() ,其中M為幅值。Uy,Uz的實現與Ux相似,相位差為120°。
,其中M為幅值。Uy,Uz的實現與Ux相似,相位差為120°。
通過控制M和x即可控制電機相電壓的幅值及相位。
開關損耗最小正弦PWM控制與霍爾位置傳感器的關系
通常直流無刷電機采用霍爾傳感器定位轉子位置,由于傳統控制方式為方波控制,因此3個霍爾傳感器即可滿足要求。霍爾傳感器的位置與轉子反電勢之間的關系見圖5,即霍爾傳感器安裝于反電勢為30°、90°、150°、210°、270°、330°的位置。具體霍爾輸出值與霍爾的具體安裝方式相關。
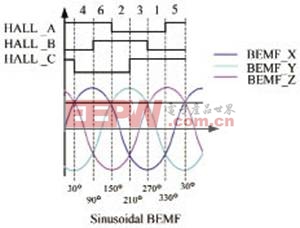
圖5 BLDC霍爾傳感器輸出與反電勢之間的關系

pwm相關文章:pwm原理










評論