基于PID控制算法的智能小車設計方案

式中:U為電樞端電壓;I為電樞電流;R為電樞電路中電阻;φ為每級磁通量;K為電動機結構參數。
由式(1)可知,直流電動機的轉速控制方法可以分為兩大類:對勵磁磁通進行控制的勵磁控制法和對電樞電壓進行控制的電樞控制法。現在大多數應用場合都使用電樞電壓控制法,本設計采用的是在保證勵磁恒定不變的情況下,采用PWM來實現直流電動機的調速方法。
電動機的電樞繞組兩端的電壓平均值U。為:

式中:占空比D表示在一個周期T里開關導通的時間與周期的比值,D的變化范圍為0≤D≤1。由式(2)可知,當電源電壓Us不變的情況下,電樞兩端電壓的平均值Uo取決于占空比D的大小,改變D值也就改變了電樞兩端電壓的平均值,從而達到控制電動機轉速的目的,即實現PWM調制。
為了便于取材和設計方便,此次設計選擇了飛思卡爾半導體公司的PC33886。PC33886在PWM調速模式驅動下可以接受20 kHz的工作頻率;具有過熱、過流、短路保護,并且通過一條反饋線將器件的工作狀態反饋給單片機。
4.2 舵機控制
舵機控制程序流程圖如圖4所示。
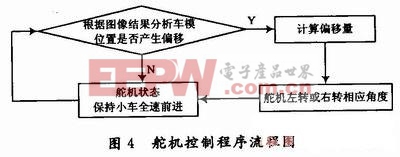
車模在行駛過程中不斷采樣路況信息,并通過分析車模與賽道相對位置判斷車模所處路況,計算轉彎半徑。所有舵機標準PWM周期為20 ms,轉動角度最大為90°,當給舵機輸入脈寬為0.5 ms,即占空比為O.5/20=2.5%的調制波時,舵機右轉90°。可以推導出轉動角度與脈寬的關系計算公式為:
t=1.5±θ/90
式中:t為正脈沖寬度,單位:ms;θ為轉動角度;當左轉時取加法計算,右轉時取減法計算。
在具體操作中PWM調制波的周期可以設置在20 ms左右一定范圍內均可以使舵機正常轉動,經反復測試最終把輸出PWM調制波周期設為13 ms。
運行電機的轉速以及舵機的轉角,在軟件上都是通過對PWM波占空比進行設置來相應控制的。
5 電源模塊
電機驅動系統要求大功率的電源供應:低內阻、大電流、對電源的紋波不敏感;單片機和圖像采集系統對電源質量要求較高:低內阻、波紋小、自身功耗不大,但要嚴防電動機在工作時產生的干擾。供電系統框圖如圖5所示。


pid控制器相關文章:pid控制器原理







評論