高精度激光直寫數字伺服濾波器的設計

激光直寫技術是一種近年來應用廣泛的超精密加工技術。該技術是一種利用強度可變的激光束,在基片表面實施有規則的高精度掃描。在掃描過程中,光刻基片隨載物平臺而運動。因此影響光刻元件的質量取決于載物平臺的定位精度以及運動的穩定性,影響光刻元件的快速性取決于系統的響應度。
基于數字式伺服的運動控制器是超精密定位系統的關鍵。由于數字伺服濾波器是數字式伺服的運動控制器的核心,從而數字伺服濾波器的設計將影響系統的定位精度。
數字伺服濾波器是指系統的閉環控制與調節采用數字技術,所有控制調節實現軟件化。調節器的全部軟件化使控制理論中很多控制思想和手段得以應用。同時利用軟件很容易完成參數的自由化和故障的自診斷功能,使系統控制性能大大提高,從而克服了模擬型閉環伺服系統對微弱信號的信噪難分離、控制精度難提高、容易受機械摩擦和溫度影響,位置環控制產生零點漂移誤差等缺點。
1 伺服控制系統結構及分析
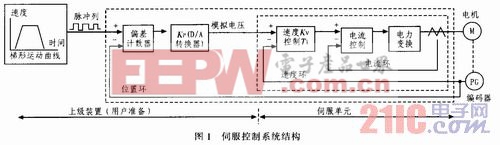
1.1 伺服控制系統結構
整個伺服控制系統的硬件結構如圖1所示。上級裝置由DSP處理器和D/A轉換模塊組成,伺服單元由安川伺服驅動器組成。整個系統是一個閉環伺服電機控制系統。DSP處理器產生梯形運動曲線的數字脈沖信號,通過設計的數字濾波器,直接驅動D/A轉換器產生模擬電壓,經過伺服單元驅動伺服電機。實際運動中的位置和速度信號由電機反饋給光編碼器,并由光電編碼器產生數字信號,然后傳輸給DSP進行采集處理。
1.2 系統分析
該方案的關鍵是解決電機軸與負載之間的粘性摩擦和外界對電機及變換器的干擾等問題。由于摩擦環和外界干擾的存在,系統的動態及靜態性能受到很大程度的影響,主要表現為低速時出現爬行現象,穩態時有較大的靜差或出現極限環振蕩。為了滿足激光直寫的要求,系統還必須具有響應速度快、定位時間短,穩態精度高等特點。若啟動速度過慢或過沖,停止時間過長,系統則具有很強的振蕩,且噪聲大。
2 數字濾波器的設計
2.1 數字伺服濾波器模型設計
通過大量實驗,對系統進行分析后發現:對位置偏差控制采用PID控制方法可以提高精度和階躍響應;加入速度和加速度前饋補償控制方法可以提高系統的穩態精度;加入摩擦補償可以克服摩擦力的影響。因此,此方案沒計是一種既利用位置誤差進行閉環控制,又利用給定位置信號進行開環的復合控制系統。
則系統控制輸出U(t)=Up(t)+Uva(t)+Uf(t),其中Up(t)為PID控制器,Uva(t)為速度和加速度補償控制器,Uf(t)為摩擦補償控制器。
PID伺服濾波器控制規律如圖2所示。
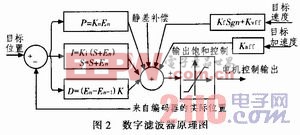
圖2中Kp為比例增益,Ki為積分增益,Kd為微分增益,Kvff為速度前饋增益,Kaff為加速前饋增益,Kf為粘性摩擦系數,En為位置偏差,Vt為t時刻速度,At為t時刻的加速度,輸出的B靜態誤差主要用于補償控制軸受重力的影響。對濾波器輸出對應的模擬量,由輸出的飽和控制器進行限制。

伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理







評論