基于TMS32OLF24O7A的教育機器人硬件系統設計

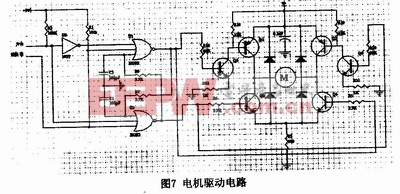
2.6 電機驅動模塊設計
本輪式機器人平臺采用左、右直流電機驅動的方式,中間有一起支撐作用的萬向輪。電機驅動模塊可以實現兩電機在任何方向旋轉從而達到小車前進、倒退和轉向的目的。電機發生轉向與否是由提供給電機驅動電路的高、低電壓信號次序決定的,它們來自前端的數字邏輯門定序電路。數字邏輯定序電路的輸入信號由2407A 產生的方向信號和PWM信號實現機器人的方向和速度的控制分為方向端和使能端,該電路同時可以避免產生電源短路對電子器件造成的損害。此小車電機驅動電路是H橋驅動電路,該電路通過控制電機電流流向達到控制轉向的目的。當Q1和04導通時,電機電流從左流向右,電機正轉;當Q2和Q3導通時,電機電流從右流向左,電機反轉。如圖7所示。
3 系統整體實現
以TMS320LF2407A為核心的教育機器人硬件系統整體功能可在軟件開發工具CCS和硬件開發工具XDS的支持下采用C語言和匯編語言混合編程進行程序仿真調試,再通過JTAG接口下載到DSP內實現,給DSP學習者帶來了極大的方便。同時,得益于2407A外部資源的豐富性,系統中未使用部分有利于學習者做進一步的功能開發和應用。
4 結語
本文設計的以智能小車為載體的基于TMS320LF2407A教育機器人硬件平臺,包括電源模塊和電機驅動模塊電路設計,并集成了紅外和光敏傳感器和無線數據傳輸模塊,通過軟件設計可實現尋跡、避障及尋跡避障相結合的功能,達到了理論課程學習與動手實踐相結合的目的,鞏固了知識并進一步提高了學習者的興趣。該整體硬件系統結構簡單,具有很好的擴展性,而且通過軟件編程控制機器人完成一定的功能,很好地鍛煉了學生的邏輯思維能力和編程能力,有助于培養學生的實踐能力和創新精神。
本文引用地址:http://www.104case.com/article/162563.htm












評論