基于TMS32OLF24O7A的教育機器人硬件系統設計

2 系統硬件模塊設計
2.1 TMS320LF2407A最小系統設計
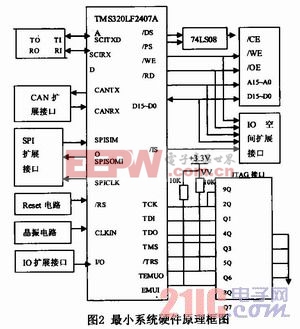
TMS320LF2407A是2000系列中目前應用最為廣泛的產品,它在片上不僅具有一個適于進行數字信號處理的高效處理器,而且還集成了存儲器和適應控制領域應用的豐富片上外設,從而構成了一個基本的片上計算機系統。除了具有改進的哈佛結構、多總線結構和流水線結構等優點外,它還采用高性能靜態 CMOS技術,電壓降為3.3V,減少了功耗,指令執行速度提高到40MIPS,幾乎所有指令都可以在2 5ns的單周期內完成。TMS320LF2407A的基本結構包括中央處理器單元(CPU)、存儲器、片內外設與專用硬件電路三個組成部分。本系統硬件平臺充分利用TMS320LF2407A控制器的特點采用模塊化設計,分為基本電路和擴展控制電路部分。基本電路包括電源電路、復位電路、時鐘電路、A/D 輸入通道和JTAG仿真電路等。擴展電路包括存儲器及譯碼電路、串行通信SCI與RS-232接口電路、CAN接口電路、SPI功能模塊等。系統硬件原理框圖如圖2所示。
2.2 尋跡模塊設計
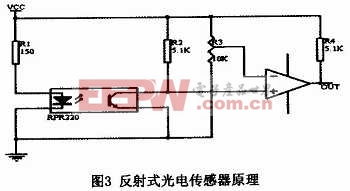
此部分采用光電傳感器對路面信息進行識別。采用RPR220型光電對管,RPR220是一種一體化反射型光電探測器,其發射器是一個砷化鎵紅外發光二極管,接收管是一個高靈敏度的硅平面光電三極管,用3個該紅外對管構成“一”字形排列在小車車頭的底部,路徑軌跡由黑線指示,根據落在黑線區域的光電三極管接收到的反射光線強度與白色區域的不同,由檢測到的黑線光電管的位置來判斷小車的位置方向看其是否偏離黑線,當紅外對管的發射二極管發出紅外線,經反射物 (白線)反射到接收管,是接收管集電極與發射極之間的電阻變小,輸入端電位變低,經比較器比較后輸出低電平,當紅外線照射到黑線上時,反射到接收管上的光亮減小,接收管的集電極與發射極間電阻增大使得輸出高電平,將輸出端信號送至2407A進行分析處理,反射式光電傳感器原理如圖3所示。3個傳感器中如果位于中間的傳感器(中傳感器)檢測到黑線,從傳感器將發出“有線”信號,后輪兩電機繼續接通運轉,結果驅動車體前進。如果除中傳感器之外,左、右傳感器中的任一個未檢測到黑線,則該傳感器輸出“無線”信號,這時脫離引導線的傳感器對側的驅動電機停止運行,同側電機繼續運行,以此達到校正行進方向的目的。本文引用地址:http://www.104case.com/article/162563.htm












評論