基于TMS32OLF24O7A的教育機器人硬件系統設計

摘要:本論文的主要目的就是設計一種基于DSP的模塊化教育機器人硬件系統。該教育機器人是以智能小車為載體基于 TMS320LF2407A微控制器的嵌入式控制平臺及編程環境的一款開放式的機器人控制系統,以各傳感器模塊設計應用為核心,采用模塊化設計思想進行設計,包括系統總體框架的設計、無線通信模塊和系統電源、電機驅動硬件電路模塊的設計。
關鍵詞:教育機器人;TMS320LF2407A;傳感器;硬件模塊
0 引言
智能機器人作為一個高新科技的綜合體,直接反應了一個國家信息技術的發展水平,受到了社會各界的高度重視。最近這些年,在我國大學里已經將機器人作為機械電子學、計算機技術、人工智能等的載體廣泛適用于工科本科生的講授課程,在中學,教育機器人則逐漸成為素質教育、技能實踐活動的選題之一,各種機器人比賽正蓬勃發展。智能機器人涉及了信息技術的幾乎所用內容,可以讓學生接觸并看到信息技術的全景,并且智能機器人是信息技術的開放平臺,學生可以充分發揮想象力去開發各種智能裝置,從而培養學生對信息技術的開發能力,在開發過程中,培養各種能力,激發學生的興趣。
1 設計思想與總體方案
1.1 教育機器人的設計思想
本教育機器人以TMS320LF2407A微控制器為核心,由紅外傳感器和光電傳感器等各種傳感器采集的外部環境信息作為輸入信號,通過DSP進行運算處理,利用PWM技術實時輸出調整小車的速度和方向,實現小車尋跡、避障、尋跡加避障等自動控制的功能,另外在小車于尋跡過
程中遇到障礙物,當尋跡加避障算法在尋跡的同時不能完成避障功能時,可由PC機與其相連的無線通信收發模塊和DSP相連的另一無線收發模塊實現無線短距離通信,控制小車脫離障礙區并進行正常尋跡。
1.2 總體設計方案和框圖
機器人小車系統整體框圖如圖1所示,主要有TMS320LF2407A最小系統部分、電源模塊、電機驅動模塊、傳感器模塊、無線通信模塊構成,實現由車載的各種傳感器將信息不斷地傳遞給車載微控制器,并將編程設計算法下載至微控制器實現實時調整小車的運動狀態,完成一定的功能要求。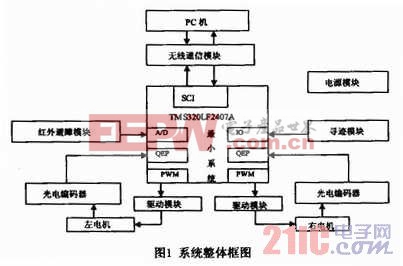












評論