卡爾曼濾波器及多傳感狀態(tài)融合估計算法

3 雷達(dá)跟蹤系統(tǒng)仿真
考慮具有3 個傳感器的雷達(dá)跟蹤常加速度模型,其離散狀態(tài)方程為:

式中T 表示采樣間隔。狀態(tài)向量x(t)= ,其中
,其中 和
和 分別表示目標(biāo)在tT 時刻的位移、速度和加速度。z(i,t)(i=1 ,2,3) 表示3 個傳感器的觀測,它們分別觀測位移、速度和加速率。即:C(1)=[1 0 0] ,C(2)=[0 1 0] ,C(3)=[0 0 1] 。v(i,t) 和w(t) 分別是觀測誤差和系統(tǒng)誤差, 都假設(shè)為零均值的高斯白噪聲, 方差分別為R(i)和Q。本節(jié)的目的是融合3 個傳感器的觀測信息, 以獲得對目標(biāo)x(t)的最佳估計。這里T=0.01 s ,Q=0.1 ,R(3)=20 ,R(2)=15 ,R(1) =8 。初始值為x (0) =[0 1510] 和P0=0.1·I3。
分別表示目標(biāo)在tT 時刻的位移、速度和加速度。z(i,t)(i=1 ,2,3) 表示3 個傳感器的觀測,它們分別觀測位移、速度和加速率。即:C(1)=[1 0 0] ,C(2)=[0 1 0] ,C(3)=[0 0 1] 。v(i,t) 和w(t) 分別是觀測誤差和系統(tǒng)誤差, 都假設(shè)為零均值的高斯白噪聲, 方差分別為R(i)和Q。本節(jié)的目的是融合3 個傳感器的觀測信息, 以獲得對目標(biāo)x(t)的最佳估計。這里T=0.01 s ,Q=0.1 ,R(3)=20 ,R(2)=15 ,R(1) =8 。初始值為x (0) =[0 1510] 和P0=0.1·I3。
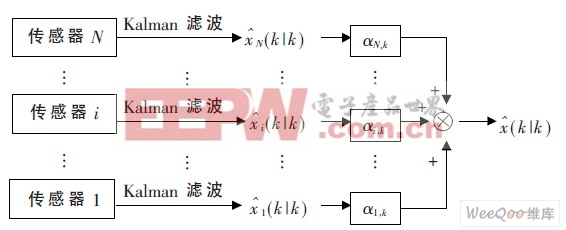
設(shè)傳感器的采樣點(diǎn)數(shù)為600 , 則10 次Monte Carlo仿真的統(tǒng)計結(jié)果如表1 所示。表1 給出了估計誤差絕對值均值比較,3 個傳感器融合的綜合估計誤差是最小的。
表1 估計誤差絕對值均值比較。

第1 個傳感器、第2 個傳感器、第3 個傳感器及3個傳感器融合的狀態(tài)估計曲線分別如圖3、圖4、圖5、圖6 所示。圖中橫軸為仿真步數(shù), 每步時間為0.01 s 。若仔細(xì)觀察這些狀態(tài)估計曲線,則單傳感器狀態(tài)估計曲線均有不足, 如圖3 對速度跟蹤不是很好, 圖4 對加速度跟蹤不是很好, 圖5 對速度跟蹤也不是很好, 只有圖6對位移、速度及加速度跟蹤均較好。由此可見, 與單傳感器Kalman 濾波的結(jié)果相比,3 個傳感器融合所獲得的估計值都更加貼近于目標(biāo)信號,從而證明了本文算法的有效性。








評論