卡爾曼濾波器及多傳感狀態(tài)融合估計(jì)算法
作者:
時(shí)間:2011-01-04
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
Carlson 在1990 年提出了一種最優(yōu)數(shù)據(jù)融合準(zhǔn)則。
設(shè) 分別表示狀態(tài)基于傳感器i 觀測(cè)信息的Kalman 濾波估計(jì)值和相應(yīng)的估計(jì)誤差協(xié)方差陣, 對(duì)于i=1 ,2,…,N, 假設(shè)
分別表示狀態(tài)基于傳感器i 觀測(cè)信息的Kalman 濾波估計(jì)值和相應(yīng)的估計(jì)誤差協(xié)方差陣, 對(duì)于i=1 ,2,…,N, 假設(shè) 不相關(guān), 則最優(yōu)聯(lián)邦濾波器最優(yōu)數(shù)據(jù)融合準(zhǔn)則由下式給出:
不相關(guān), 則最優(yōu)聯(lián)邦濾波器最優(yōu)數(shù)據(jù)融合準(zhǔn)則由下式給出:

其中:

相應(yīng)的估計(jì)誤差協(xié)方差矩陣為:

可以證明:

其中P(k|k)表示 的估計(jì)誤差協(xié)方差。
的估計(jì)誤差協(xié)方差。
基于第i 個(gè)傳感器信息的Kalman 濾波估計(jì)器如圖1 所示。Carlson 聯(lián)邦融合估計(jì)算法流程圖如圖2 所示。
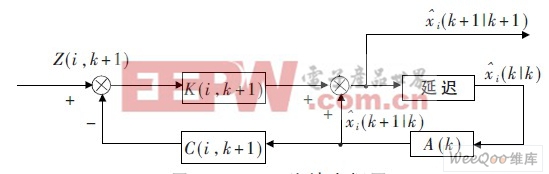
圖1 Kalman 濾波方框圖







評(píng)論