基于模糊PID控制算法的恒溫石英晶體振蕩器

4 模糊PID控制系統(tǒng)仿真及結(jié)果分析
由于恒溫晶體振蕩器控制系統(tǒng)加熱部分本身具有滯后性、非線性、時變性的特點,將其近似為一個二階滯后環(huán)節(jié)的描述為:

4.1 模糊PID控制系統(tǒng)仿真
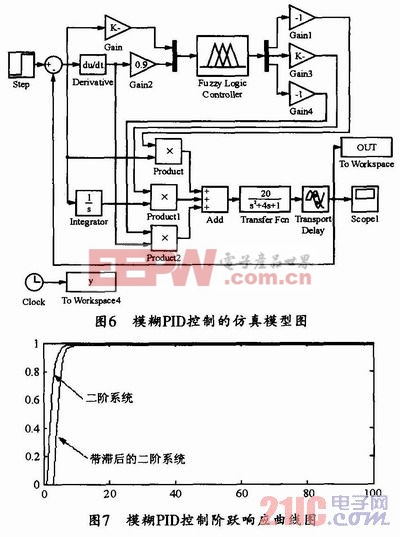
在Matlab的Command Window窗口運行Fuzzy函數(shù)進入模糊邏輯,確定模糊控制器類型,編輯輸入輸出變量的隸屬度函數(shù),建立模糊控制規(guī)則,生成*.fis文件并導(dǎo)入到仿真系統(tǒng)中的模糊控制器命名為md.fis。接下來返回到Command Window窗口,輸入Simulik進入Simulik環(huán)境下。建立如圖6所示的完整模型。然后再雙擊Fuzzy Logic Controller圖標,在彈出對話框中輸入md即可。仿真實驗結(jié)果如圖7所示。本文引用地址:http://www.104case.com/article/162185.htm
4.2 PID控制系統(tǒng)仿真
在Matlab的Simulink環(huán)境中建立如圖8所示的PID控制仿真框圖,得到仿真結(jié)果如圖9所示。
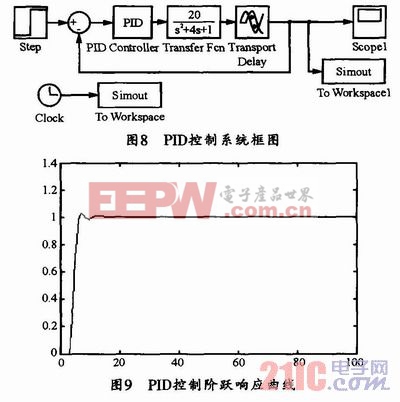
由仿真結(jié)果可明顯看出模糊自整定PID調(diào)節(jié)較之常規(guī)PID調(diào)節(jié),系統(tǒng)的快速性和穩(wěn)定性得到了提高,總結(jié)起來模糊自整定PID主要有以下幾個優(yōu)點:
(1)模糊自整定PID算法初值為零,不需要人工給定初始整定值,也能通過自整定獲得參數(shù)的最優(yōu)值,且實現(xiàn)簡單,而常規(guī)PID算法需要操作者根據(jù)以往的累積經(jīng)驗以及實際的系統(tǒng)輸出經(jīng)多次試調(diào)之后獲得較優(yōu)值。
(2)模糊自整定PID算法的超調(diào)量和調(diào)整時間均小于常規(guī)PID算法。
(3)模糊自整定PID控制器使系統(tǒng)的快速性和各項性能指標得到顯著提高,說明了該方法的有效性。
5 結(jié)束語
文中設(shè)計了一種基于模糊PID控制算法的恒溫晶體振蕩器。該系統(tǒng)利用c8051f300單片機為控制核心實現(xiàn)了晶體振蕩器溫度的實時控制,并用Matlab進行了仿真。仿真結(jié)果表明,該系統(tǒng)既能保證溫度調(diào)節(jié)的快速性,又能滿足系統(tǒng)達到晶體諧振器拐點溫度時系統(tǒng)的穩(wěn)定性,可以保證頻率穩(wěn)定度的恒溫控制。











評論