基于模糊PID控制算法的恒溫石英晶體振蕩器

摘要:為了提高石英晶體振蕩器的頻率穩定度,除了選取高性能的諧振器外,對其采取恒溫控制方式是保證其穩定震蕩的關鍵。本文給出了一種采用雙層恒溫槽及采用模糊PID控制算法,外層加溫部分控制基礎加溫,內層加溫部分實現精確加溫,從而提高恒溫石英晶體振蕩器的穩定性和啟動性的設計方法。同時,在MATLAB環境下建立了數學模型,進行了仿真研究,結果表明采取模糊控制算法和PID控制算法結合的算法比單純采用PID控制算法溫度上升快,超調量小,也更加穩定。
關鍵詞:恒溫晶體振蕩器;諧振器;模糊PID控制;算法
0 引言
恒溫晶體振蕩器是目前頻率穩定度最高的晶體振蕩器,作為精密時頻信號源被廣泛應用在全球定位系統、通信、計量、頻譜及網絡分析儀等電子儀器中。現代通信的迅速發展對恒溫晶體振蕩器的穩定度提出了更高的要求。為了獲得較高的頻率穩定度,必須采用高品質的石英諧振器以及良好的控溫系統實現恒溫控制。傳統的PID控制算法簡單、魯棒性好、可靠性高,并且可以消除穩態誤差。而在實際中被控對象往往具有非線性、不確定性難以建立精確地數學模型,因此應用傳統的PID控制器難以達到理想的控制效果。鑒于模糊控制具有快速性的特點,同時還可以保持較小的超調量。文中將模糊控制與PID控制算法相結合,從而得到一種控制規則簡單,控制性能良好的控制方法。
1 恒溫晶體振蕩器硬件原理
由于晶體振蕩器的頻率溫度特性主要由石英諧振器的頻溫特性決定。因此在制作恒溫晶體振蕩器前,首先要選擇性能良好的高品質諧振器,不同切型的諧振器頻率溫度系數也不同,AT切諧振器的振蕩頻率與溫度的關系呈近似三次函數關系,具有零溫度系數點。因而把控制溫度設定在諧振器頻率溫度曲線拐點溫度處即可實現振蕩器輸出穩定頻率的目的。由高品質的諧振器和穩定的振蕩電路所組成的恒溫晶體振蕩器基本框圖如圖1所示。
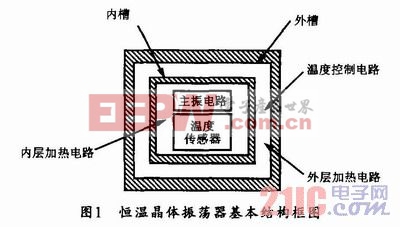
它的工作原理是:在外層加熱電路中,控制芯片根據片內傳感器所測得的溫度對外槽內控制加溫至接近石英諧振器拐點溫度處實現基礎加溫控制;內層加熱電路中,控制芯片根據溫度傳感器所測得的溫度對內槽控制加溫,使內槽溫度穩定在石英諧振器拐點溫度處從而實現精確加溫控制。內槽在制作上選用導熱系數高的紫銅,提高內槽的傳熱性能;外槽在制作上選用導熱系數較低的聚氨酯泡沫塑料灌注,使其和元器件粘在一起,不僅保溫性好而且有防震的功能。
控溫部分采用單片機c8051f330來控溫,它主要通過軟件實現,結合硬件電路,構成數字化精確控溫。這里主要介紹控溫算法的實現以及MATLAB仿真測試結果。
2 PID控制器的控制原理
PID控制器是一種線性控制器,其原理如圖2。
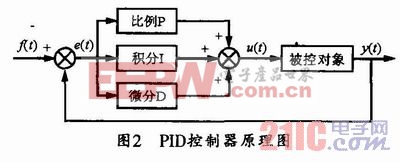

式(1)中Kp為比例系數;Ti為積分時間常數;Td為微分時間常數。
在PID控制過程中,首先根據被控對象的數學模型確定PID,然后再用偏差e作為輸入,計算出控制量,并驅動相應的執行機構來減小誤差,直到被控對象穩定在允許的范圍內。











評論