基于模糊PID控制算法的恒溫石英晶體振蕩器

3 模糊PID控制器的控制設計
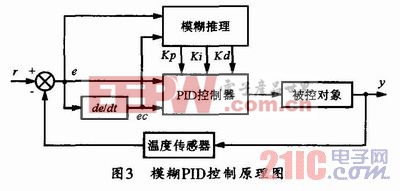
模糊PID控制器以偏差E和偏差變化率Ec作為輸入,可以滿足不同時刻的E和Ec對PID參數自整定的要求,利用模糊規則在線對PID參數進行修改,便構成了模糊自整定PID控制器,其結構如圖3所示。本文引用地址:http://www.104case.com/article/162185.htm
3.1 模糊控制規則的設計
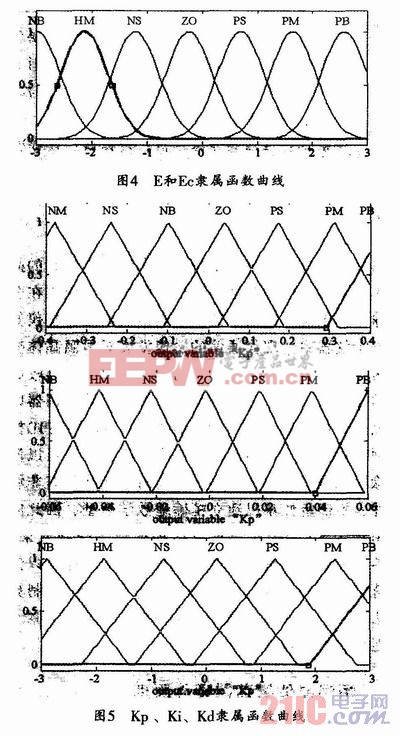
將偏差E和偏差變化率Ec作為模糊控制器的輸入,PID控制器的三個參數Kp、Ki、Kd作為輸出。根據項目實際情況,E和Ec模糊子集為{負大、負中、負小、零、正小、正中、正大},記為{NB、NM、NS、ZO、PS、PM、PB},將E和Ec量化到(-3,3)的區域內。同時Kp、Ki、Kd的模糊子集{負大、負中、負小、零、正小、正中、正大},記為{NB、NM、NS、ZO、PS、PM、PB},分別量化到(-0.4 0.4)(-0.06 0.06)(-3 3)區域內,輸入采用高斯型隸屬度函數,輸出采用三角形隸屬度函數,其隸屬函數如圖4、圖5所示。











評論