MEMS加速度傳感器的自動校準平臺

3.2 支腳的設計
當前廣泛使用的支腳類型包括液壓式和機械式兩種。液壓型的支腳雖然輸出功率較大,但是也存在明顯的缺點:液壓油本身可壓縮,液壓油粘滯系數隨溫度變化,液體容易泄漏,液壓油可燃,設備不能自鎖,檢修困難等。機械支腳雖然慣性較大,但適應性強并可以實現機械鎖緊。考慮到現場環境可能比較惡劣,本文采用了機械式調平方法,系統結構示意圖如圖4所示。本文引用地址:http://www.104case.com/article/161924.htm
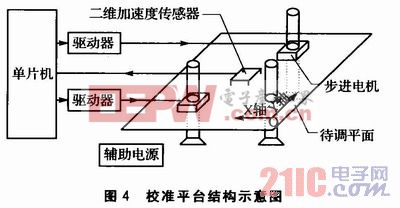
將電機軸設計為中空的螺母式結構,支腳就是旋人其中的螺桿。平臺的支撐架由兩部分組成:電機和臺面構成的整體、旋在電機軸內的螺桿。螺母及其相連的內筒固定不動而螺桿旋轉,帶動電機以及上面的平臺一起作直線運動。這種螺旋傳動的方式將旋轉運動轉化為直線運動,從而實現平臺的升降,并且能在任何高度自鎖。
如圖4所示,單片機收到加速度傳感器送來的傾角信息后,在實時顯示的同時按照預先設定的控制算法,控制步進電機的轉動。電機軸的正反轉動轉化為支撐軸的上升和下降,從而實現對傾斜平面的調平。
3.3 系統軟件設計
自動校準平臺的程序流程如圖5所示,其中最主要的部分是角度信號的采集、數據的進一步處理以及電機的自動控制。信號采集環節主要是完成傳感器與單片機之間的I2C串口通信;數據處理環節包括正負角度值修正、傳感器輸出的線性化處理以及軟件濾波;電機控制環節包括快慢檔調節、零點鎖定和PID控制。
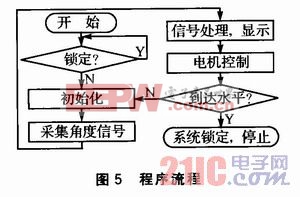
其中,電機控制與平臺調平直接相關。系統根據檢測到的傾角大小,在不同的傾角范圍采取不同的調平速度和調平精度。傾角較大時調平精度較粗,電機一次轉動的步數較多,支撐軸的伸出速度越快,調平速度就越快;傾角小于低速閾值時,電機轉動頻率降低,支撐軸的伸出速度變慢,使平臺形變和支腿伸出速度過快所帶來的不良影響得以減小,從而在整體上兼顧了調平速度和調平精度。
從實際應用出發,考慮到當基座調平完成后,平臺上的設備便開始工作,如果該設備在運行過程中產生振動,則必然導致基座不穩定。若不加任何防范措施,其結果就是平臺上設備工作的同時基座繼續調平,這對于設備的正常運行是非常不利的。特別當其應用于吊車、火炮等有較高穩定性要求的調平場合時,上述情況是非常危險的。因此,在原先的基礎上增設了調平完成后的自鎖定功能,以及手動解鎖按鈕。
整個調平過程是一個離散化的動態趨近過程。在系統跟蹤傾角狀態的每個周期,平臺都逐步逼近水平位置,直至與水平面的差別小于停機閾值。此時電機停轉,平臺鎖定,系統默認一次校準任務完成。在下一次基座調平任務來臨之前,需要手動操作解鎖按鈕,以喚醒系統工作。從系統動態調平的思想中可以看出,兩臺電機的擺放位置并不是固定的,只要3個支撐點不共線,平臺就可以實現自動調平。
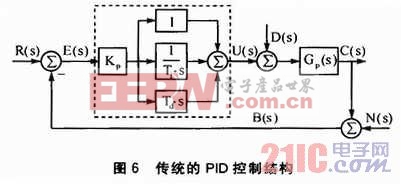
為使系統更加穩定、準確的完成調平工作,采用了基于PID的反饋控制算法。傳統的PID控制結構如圖6所示,虛線框內是PID控制器,R(s)為輸入量,C(s)表示復雜系統輸出,B(s)是反饋量,控制偏差信號E(s)=R(s)-B(s),G。(s)表示被控過程,D(s)為外界干擾,N(s)是傳感器噪聲。

pid控制器相關文章:pid控制器原理
傾角傳感器相關文章:傾角傳感器原理











評論