MEMS加速度傳感器的自動校準平臺

2 平臺調平原理
目前工程上4支點或更多支點的調平系統應用廣泛,這主要是從穩定性角度考慮的,但超過3根支腳后必然要面臨超定位的問題。由于虛腿的出現,平臺上的設備工作時不能保證每根支腳上的受力具有重復性,從而導致支架形變,影響調平精度。而在3點調平結構中,各支腳受力均勻,只要支腳設計得當就可以保證較高的穩定性,調平控制模型如圖2所示。本文引用地址:http://www.104case.com/article/161924.htm
。
3 系統硬件設計
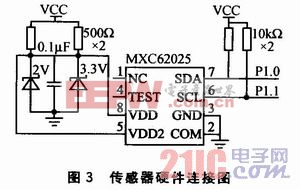
3.1 傳感器硬件連接
加速度傳感器以I2C總線標準輸出數據,由于本身即為數字量,因而節省了模/數轉換所需的硬件,但I2C接口為開漏輸出結構,必須接上拉電阻后才能輸出高電平。其硬件連接如圖3所示,8腳上的電源電壓需穩定在2.7~3.6 V,5腳上的I2C輔助電壓標稱值為1.8 V,但只要低于8腳上的電壓值亦可正常工作,電源與地之間通過一個0.1μF電容濾波。由于采用的單片機STC10F08沒有I2C接口,故將其通用I/0接口P1.0和P1.1模擬成I2C接口的SDA和SCL。

pid控制器相關文章:pid控制器原理
傾角傳感器相關文章:傾角傳感器原理











評論