無線傳感器網絡的T5743芯片接受節點設計

無線傳感器網絡接收節點的數字電路和模擬濾波器的全部定時都是來自一個時鐘。這一時鐘周期TCLK 是從晶體振蕩器經分頻器得到的,分頻次數由MODE 引腳端的邏輯狀態控制[3]。晶體振蕩器的頻率是由RF 輸入信號決定的,它也同時決定了本地振蕩器的頻率(fLO)。T5743 芯片的工作狀態是由OPMODE 和LIMIT 的兩個15 位RAM 寄存器進行設置的,寄存器可由雙向DATA 口編程。如果寄存器內容由于掉電而改變,這一狀態由一個稱為復位標識(RM)的輸出表示出來,在這種情況下的接收電路必須重新編程。在加電復位(POR)后,寄存器被置為默認模式,如果接收機工作默認模式,不需對寄存器編程。同樣,如果接收電路不是在復位方式,就會啟動相應的OFF 指令編程;如果接收電路處在復位方式,相應的OFF 指令編程不會被啟動,在DATA 腳仍呈現復位標志。
四、接收節點電路
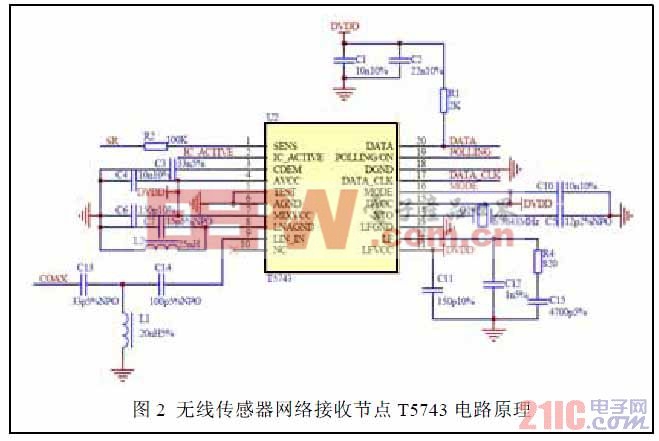
無線傳感器網絡接收節點芯片T5743 是一個高度集成的PLL 無線接收模塊,能夠接收并解調FSK 調制的曼徹斯特編碼數據,同時通過一個雙向數據口將其發送出去[4]。該無線接收芯片通過一個智能的輪詢方式使接收節點在大部分時間處于休眠模式,只有在監測到有效傳輸時,才會結束休眠模式轉換為接收模式,并將數據流傳送給控制器。這樣,可以最大限度地減少能量消耗。圖2 為無線接收節點電路原理圖。
圖2 中接收芯片的T5743 的XTO 是參考晶振的出入端,引腳LNA_IN 提供RF 到LNA 輸入,設計采用的接收頻率為433.92MHz,所以fXTO=6.76438MHz,將MODE 引腳設置為高電平,數據時鐘周期TCLK 為2.0697μs。DATA 引腳接到RB0 引腳,DATA_CLK 引腳接到RB2 引腳,POLLING 引腳接到RC7 引腳,IC_ACTIVE 引腳接到RF1 引腳,至此完成T5743 與MCU 微處理器PIC18F6620 的連接。
接收芯片的T5743 的LF 引腳連接一個帶寬為100kHz 的無源環路濾波器。LNA_GND 引腳的電感L 為25nH,L 是饋電電感,以建立供電DC 通路。C7 與L 一起形成串聯諧振電路。LNA_IN 引腳連接天線,中間部分為T 型匹配網絡。
五、數據傳輸誤碼率測試
對無線傳感器網絡接收節點接收數據有效性的測試,必須通過驗證系統的性能進行,在一定距離內進行系統通信測試時,判斷數據傳輸的可靠性和有效性[5]。在對網絡接收節點的T5743 芯片完成輸入輸出波形和電路邏輯的時序檢測后,將無線網絡接收節點與PC 機相連,改變發射端與接收端之間的距離,測試通訊距離及相應的誤碼率。設計中將發射端以5kB 的數據速率發送20062120133~20062240266 均勻遞增的測試數據,誤碼測試程序將接收到的數據與自己生成的數據序列(20062120133~20062240266)同步、對比測得誤碼率。表1 為接收節點的數據誤碼率測試結果。
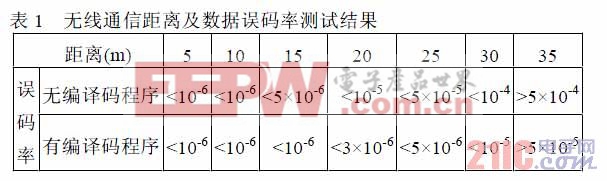
在通信距離及通信誤碼率測試過程中,5m~10m 通信距離中外界干擾對系統的影響較小,甚至人為制造的電磁干擾對其通信誤碼率影響也較小,接收節點能夠穩定有效的工作;10m~30m 的通信距離,外界的干擾對系統的影響較大,接收節點通信誤碼率上升,但仍能滿足通訊要求,接收節點工作性能出現間或不穩定;大于30m 以上系統工作不穩定,通信誤碼率上升很快,接收節點已不能滿足通信數據傳輸要求。
六、結論
無線傳感器網以無線通信技術為基礎設計網絡接收節點,采用RF 射頻接收芯片T5743 無線接收傳感器采集的數據,將接收數據經過MCU微處理器PIC18F6620 處理,實現無線網絡數據傳輸。本設計實現了對傳感器采集數據的無線接收,在短距離無線通信中能夠有效、準確的接收數據,減少誤碼率的發生。













評論