基于AT89S52的多功能智能小車設計

2.4 避障模塊
小車在運行中如果前方有障礙物,小車則開始向后后退一段時間后,向左運動,在向左運行一段時間后,再開始向前運行。在整個調向的過程中,蜂鳴器響動。這個就是避障功能。該功能是由安裝在小車前方的一對紅外發射管實現,原理與尋跡模塊相同。
2.5 遙控模塊
遙控模塊由紅外發射與接收兩部分組成。紅外發射采用常用的TC9012集成芯片,將某個按鍵所對應的控制指令和系統碼(由0和1組成的序列),調制在38 kHz載波上,然后經放大、驅動,紅外發射管將信號發射出去。接收部分采用紅外一體化接收頭,當接收到38 kHz紅外信號后就輸出低電平,沒有接收到就輸出高電平,電平信號由單片機的外部中斷來接收。信號的下降沿觸發外部中斷。為了識別一個完整的鍵信號,必須對每一個編碼脈沖的寬度進行測量,利用單片機中的定時器/計數器來測量脈沖寬度,以判別接收到的脈沖是0還是1。通過遙控模塊,可將按鍵值顯示在數碼管上,并控制小車的行進方式。
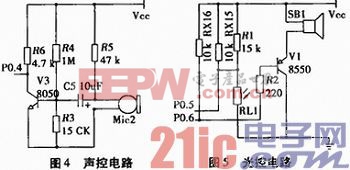
2.6 聲光控模塊
該小車具有簡單的聲控功能,P0.4為機器人的聲控檢測端口,在運行為前進狀態時,可以通過聲控來控制它的運行與停止。聲音的輸入是通過話筒,由話筒對聲音信號進行識別,如圖4所示。由于電路能有效去除雜波,所以僅能對響度較大的聲音進行識別(如拍手聲)。像正常的說話聲對本電路濾除,不會產生信息的輸入。同時該小車還具有光控功能,如圖5所示。當為白天或黑夜時可以通過P0.5端口中的光敏電阻來進行判斷,以方便完成機器人夜間自動照明等功能。當光線較暗時,由P0.6端口輸出信號控制蜂鳴器發聲。本文引用地址:http://www.104case.com/article/159611.htm
2.7 通信模塊
通信模塊是采用AT89S51自帶的全雙工串行通信口P3.0和P3.1來實現。可用電腦通過串口向小車發送數據,數據在數碼管上顯示,并且小車根據數據執行相應的動作,如前進、左轉、右轉、后退等。通信波特率為9 600,數據為8位,無校驗位。
3 系統軟件設計
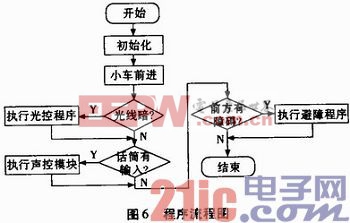
該智能小車的軟件控制部分采用C語言編程,借助C語言的強大功能來實現單片機AT89S52的控制功能。小車各個模塊都可以編寫相應的程序,也可以將這些分立的程序模塊(一般尋跡模塊除外)組合起來,完成強大的功能。主流程圖如圖6所示。
4 結論
本文提出了一種基于AT89S52單片機為控制核心的多功能智能小車的設計方案,該方案以紅外傳感器作為路徑信息采集手段,以LG9110芯片來控制并驅動電機運行,實現小車在固定軌跡上自動循跡、避障。同時還具有聲光控功能,能根據外界聲音、光線來控制小車的動作。整個設計功能豐富,電路簡單,成本低且易于實現,具有很強的操作性。






評論