基于AT89S52的多功能智能小車設計

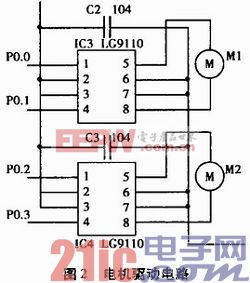
2.2 電機驅動模塊
智能小車采用前輪驅動,左右前輪各用一個直流電機驅動。電機驅動芯片采用LG9110,該芯片兩個輸出端能直接驅動電機的正反向運動,具有較大的電流驅動能力。單片機的P0.0,P0.1,P0.2,P0.3分別連接到LG9110的兩個輸入端,用以驅動電機M1和電機M2,如圖2所示。不同的輸入信號控制電機的正轉與反轉,以完成機器人的前進,后退,左轉,右轉,遇障礙物繞行等基本動作。兩個電機同時正轉時,小車前進;兩個電機同時反轉時,小車后退;左側電機不轉,右側電機正轉,小車左轉;左側電機正轉,右側電機不轉,小車右轉。這些基本動作正確,實現簡單。本文引用地址:http://www.104case.com/article/159611.htm
2.3 尋跡模塊
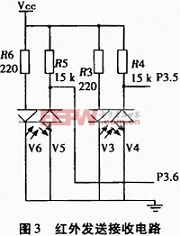
尋跡在這里是指沿黑線行走,它靠小車前端底部的兩對紅外發射和接收探頭來完成。如圖3所示,V6、V5為小車左側的紅外發射與接收管,V3、V4為小車右側的紅外發射與接收管。發射管發出紅外線,當碰到黑色或不反光的物體時,紅外反射量大量減少,若碰到白色或反光的物體時,紅外反射量則較多,紅外接收管將接收的反射光轉化成電壓值,由P3.5,P3.6送回到單片機,經過處理后控制信號由P0.0,P0.1,P0.2,P0.3口輸出給電機驅動電路的LG9110芯片,從而達到驅動小車行走和循跡的目的。循跡時,由于紅外線在白色地板和黑線上的反射系數不同,所以可以根據三極管接收紅外線的強弱來決定小車的走向。當左右接收管都能接收到反射回來的紅外線,則小車直線前進;當左邊接收管接收不到反射回來的紅外線,右邊接收管能接收到時,說明小車向右偏離黑色軌道,則小車向左轉動;同理右邊接收管接
收不到反射回來的紅外線,左邊接收管能接收到時,說明小車向左偏離黑色軌道,則小車向右轉動,從而實現自動循跡。本設計中紅外傳感器離地面垂直距離為1~1.5 cm,能在沒有強烈日光干擾或在有日光燈的房間里,完全能滿足探測要求,具有很好的可靠性與抗干擾能力。






評論