循跡小車的追蹤與避障

摘要:介紹了采用灰度傳感器的自循跡小車的設計與實現,并加以追蹤與避障的功能。采用與白色地面反差很大的黑色路線引導小車按既定路線前進,若接近開關檢測到物體時,實現追蹤功能。通過改編程序,同樣利用這兩個接近開關可實現避障功能,即遇到障礙物時,自動轉彎。
關鍵詞:追蹤;避障;循跡;灰度傳感器
隨著人們物質文化生活水平的不斷提高,智能化的電子玩具深受人們的喜愛,尤其是各種智能小車,由于這類玩具具有較好的交互性,可控性,能夠給人們帶來很好的娛樂以及參與其中的體驗,高科技智能化的電子類玩具逐漸成為市場的主流。與此同時,智能小車可以應用于考古、機器人、醫療器械等許多方面,尤其在足球機器人研究方面具有很好的發展前景。因此,智能化小車的研究不僅具有很大的現實意義,還具有極為廣闊的應用前景和市場價值。
1 系統設計
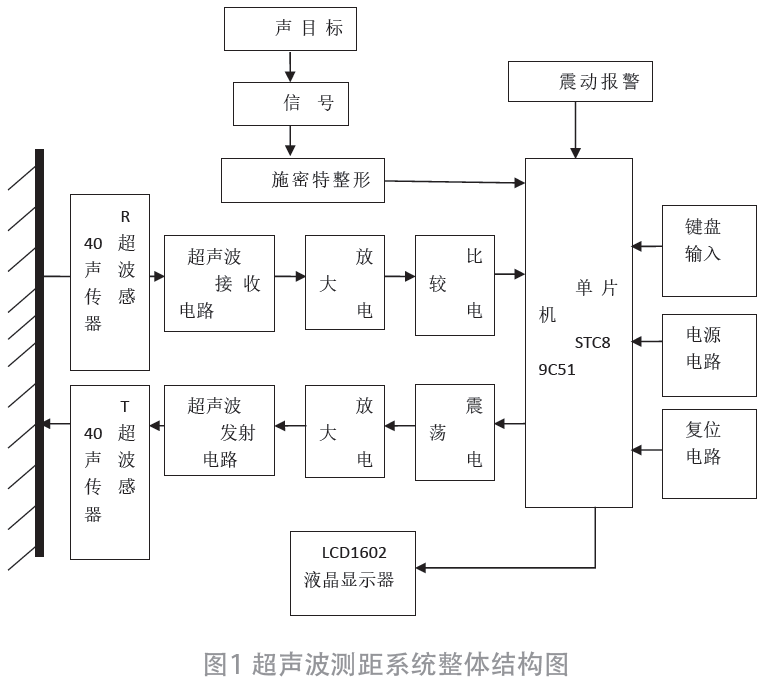
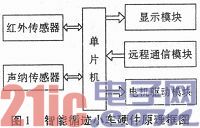
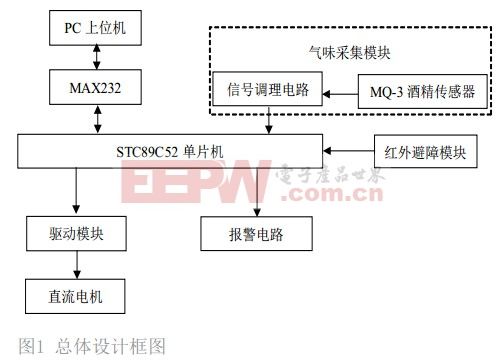
循跡小車左右車輪各用一個直流減速電機驅動,通過調制兩個輪子的轉速從而達到控制轉向的目標,在車體前按照一定方式安裝七個灰度傳感器,將傳感器所檢測到的信號送到CPU,通過CPU控制電機所轉方向,實現小車的循跡。在小車車體上左右安裝兩個紅外傳感器,當傳感器檢測到前面有物體時,即實現追蹤功能,當左邊一個傳感器檢測到時,即向左轉,同理,右邊一個檢測到時,即向右轉。若要讓其實現避障功能,則需改變原始程序,若這兩個紅外傳感器檢測到障礙物時,即向右轉(也可向左轉)。自動循跡小車控制系統框圖如圖1所示。

2 灰度傳感器排布與循跡實現
本系統使用的灰度傳感器為ITR9909,根據實驗測得其離地面大約1.5cm時,高低電平電壓差最大,所以安裝時,離跑道高度為1.5cm。
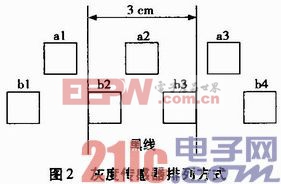
本系統灰度排布為兩排,前排三個,后排四個。前排每一個與后相應兩個占3 cm(循跡黑線的寬度),如圖2,若a1,b2檢測到黑線時,小車速度的80%向左微轉,若a1,b1檢測到黑線時,小車以原速度的50%向左轉,只有b1檢測到時,小車以原速度的30%向左轉。若a2,b3檢測到黑線時,小車以原速度的80%向右微轉,a3,b4檢測到時,則以原速度50%向右轉,只有b4檢測到時,則以原速度30%向右轉。其它情況小車即直走。灰度傳感器排列方式如圖2所示。



評論