無刷直流電動機調速系統(tǒng)的混合模糊PID控制

2.2 模糊控制器的設計
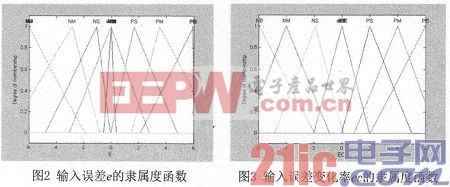
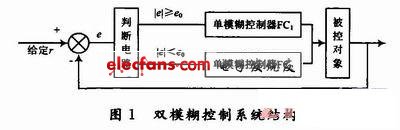
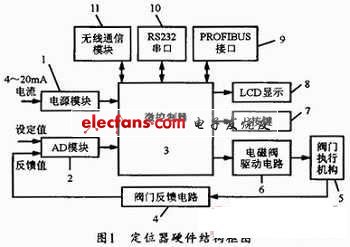
在圖1所示的模糊PI智能控制中,根據(jù)人類已有的經驗,設計簡單的模糊控制器的結構應用于BLDCM速度環(huán),在該控制器中選擇的輸入變量為轉速誤差e、誤差變化率ec以及變積分系數(shù)ei,輸出變量為積分控制器(模糊控制器2)輸出ui和二維模糊控制器(模糊控制器1)輸出uf。無論是誤差、誤差變化率還是變積分系數(shù),都是精確輸入值。模糊化就是使之離散化,變?yōu)檎麛?shù)論域中的元素。將誤差e,變積分系數(shù)ei、誤差變化ec及控制量uf和ui的模糊集及其論域分別定義如下:

上述的誤差模糊集選取八個元素,用以區(qū)分NO和PO兩個元素,目的在于提高系統(tǒng)的穩(wěn)態(tài)精度。輸入誤差、輸入誤差變化率、輸入變積分系數(shù)及輸出變量的隸屬度函數(shù)關系如圖2、3、4、5、6、7所示,輸出控制曲面如圖8所示。本文引用地址:http://www.104case.com/article/159318.htm


pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理

評論