基于閉環(huán)模糊控制的步進(jìn)系統(tǒng)仿真研究

摘要:以中國(guó)大洋協(xié)會(huì)(COMRA)深海采礦測(cè)控實(shí)驗(yàn)系統(tǒng)中的步進(jìn)驅(qū)動(dòng)控制系統(tǒng)為例,采用優(yōu)化的步進(jìn)電機(jī)升降速曲線,建立了等效的仿真模型,重點(diǎn)進(jìn)行了步進(jìn)驅(qū)動(dòng)控制系統(tǒng)模糊PID控制器的仿真研究。與經(jīng)典PID控制器的對(duì)比結(jié)果表明,模糊PID控制器具有更高的精度和更強(qiáng)的適應(yīng)性,非常適用于控制系統(tǒng)內(nèi)部參數(shù)非線性且強(qiáng)耦合的場(chǎng)合。
本文引用地址:http://www.104case.com/article/201610/307883.htm關(guān)鍵詞:模糊控制;仿真;步進(jìn)電機(jī);驅(qū)動(dòng)控制
0 引言
步進(jìn)電機(jī)能將輸入的數(shù)字脈沖轉(zhuǎn)換為角位移輸出,易于用計(jì)算機(jī)進(jìn)行控制。步進(jìn)電機(jī)是伺服系統(tǒng)中應(yīng)用最為廣泛的執(zhí)行元件。在自動(dòng)控制、移動(dòng)機(jī)器人等工程領(lǐng)域,有至少三分之二的伺服控制系統(tǒng)是步進(jìn)驅(qū)動(dòng)系統(tǒng)。然而,基于開環(huán)控制的步進(jìn)驅(qū)動(dòng)系統(tǒng)存在振蕩和失步,在很多需要精確控制的工程領(lǐng)域會(huì)導(dǎo)致許多問(wèn)題。因此,研究開發(fā)步進(jìn)電機(jī)的高精度驅(qū)動(dòng)控制系統(tǒng)具有重大的現(xiàn)實(shí)意義。對(duì)于步進(jìn)電機(jī)這種內(nèi)部參數(shù)非線性且強(qiáng)耦合的系統(tǒng),普通PID控制的效果不夠理想。而模糊控制本質(zhì)上就是一種非線性控制,非常適合步進(jìn)電機(jī)系統(tǒng)的控制驅(qū)動(dòng)。
1 課題來(lái)源
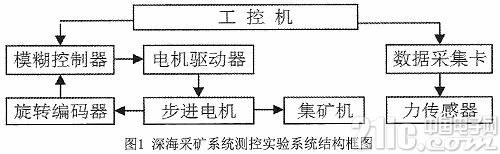
多金屬結(jié)核是一種蘊(yùn)藏在6000米深海底的極賦經(jīng)濟(jì)價(jià)值的礦產(chǎn)資源。近十幾年來(lái),中國(guó)已投入大量人力物力對(duì)多金屬結(jié)核采礦系統(tǒng)和開采技術(shù)進(jìn)行了深入的研究。鑒于深海作業(yè)環(huán)境的特殊性和復(fù)雜性,深海多金屬結(jié)核的開采面臨著諸多困難和風(fēng)險(xiǎn)。因而,我國(guó)對(duì)多金屬結(jié)核采礦系統(tǒng)進(jìn)行了虛擬樣機(jī)的建模和計(jì)算仿真。同時(shí),必須采用實(shí)驗(yàn)手段驗(yàn)證建模仿真結(jié)果的合理性和正確性。研制深海采礦系統(tǒng)的測(cè)控實(shí)驗(yàn)系統(tǒng)正是為了這一目的而展開的。而測(cè)控系統(tǒng)中最重要的部分之一就是步進(jìn)電機(jī)的驅(qū)動(dòng)控制系統(tǒng)。高性能的控制策略能使實(shí)驗(yàn)系統(tǒng)具有高精度和更好的穩(wěn)定性,它對(duì)于實(shí)驗(yàn)數(shù)據(jù)的正確性和準(zhǔn)確性至關(guān)重要。
測(cè)控實(shí)驗(yàn)系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。
2 步進(jìn)驅(qū)動(dòng)系統(tǒng)的控制策略與仿真研究
2.1 步進(jìn)電機(jī)升降速曲線選擇
常見的升降速曲線主要有階梯升降速、加速度恒定升降速和定常數(shù)遞減升降速三種。階梯升降速方法的缺點(diǎn)是步進(jìn)電機(jī)在速度階躍時(shí)容易失步。加速度恒定升降速方法未充分考慮步進(jìn)電機(jī)輸出力矩隨速度變化的特性,在高速時(shí)也會(huì)失步。定常數(shù)遞減的升降速方法的缺點(diǎn)是低頻時(shí)升速太慢,高頻時(shí)升速太快。以上三種升降速曲線都不夠理想,因此應(yīng)該在研究步進(jìn)電機(jī)的運(yùn)動(dòng)特性的基礎(chǔ)上設(shè)計(jì)其升降速運(yùn)行曲線。
由步進(jìn)電機(jī)動(dòng)態(tài)特性可知其慣性扭矩為:
上式中:J系統(tǒng)總轉(zhuǎn)動(dòng)慣量;ω是電機(jī)角速度;β是機(jī)械阻尼和電磁阻尼系數(shù);ε是角加速度;TL是摩擦阻力矩和負(fù)載力矩;Te是步進(jìn)電機(jī)電磁轉(zhuǎn)矩。
由式(1)可知,步進(jìn)電機(jī)的轉(zhuǎn)矩在驅(qū)動(dòng)脈沖頻率較低時(shí)比較大,隨著頻率的上升近似于線性下降。
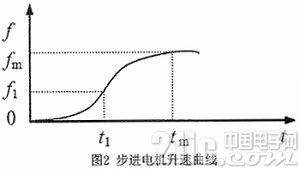
在升速階段,為了提高系統(tǒng)的快速性,應(yīng)使角加速度ε盡可能大。在保證步進(jìn)電機(jī)不失步的前提下,轉(zhuǎn)子角加速度ω正比于頻率f對(duì)時(shí)間的微分。步進(jìn)電機(jī)的升速曲線如圖2所示。降速曲線為升速益線的對(duì)稱曲線。這種升降速曲線能充分利用步進(jìn)電機(jī)的有效轉(zhuǎn)矩。快速響應(yīng)性好,并且可以防止失步和過(guò)沖,容易在微處理器控制的驅(qū)動(dòng)器上實(shí)現(xiàn)。
2.2 步進(jìn)電機(jī)的數(shù)學(xué)模型
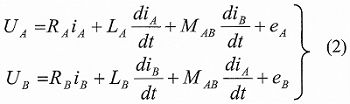
由兩相混合式步進(jìn)電機(jī)的電氣與電磁回路結(jié)構(gòu),可得出其線性等值回路如圖3。兩相混合式步進(jìn)電機(jī)的仿真模型可以歸結(jié)為兩相繞組回路的電壓方程和轉(zhuǎn)子的運(yùn)動(dòng)方程。轉(zhuǎn)子的運(yùn)動(dòng)方程參見式(1),回路的電壓方程如式(2)所示:
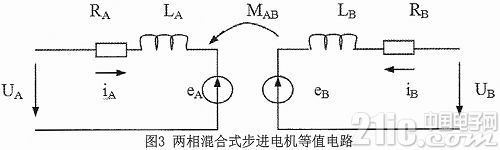
上式中,eA、eB為A、B繞組中的運(yùn)動(dòng)電勢(shì),UA、UB為端電壓;RA、RB為A、B繞組的線圈電阻;iA、iA為繞組電流;LA、LA為繞組自感;MAB為繞組互感,一般來(lái)說(shuō),兩相步進(jìn)電機(jī)相間互感較小,可忽略不計(jì)。
根據(jù)式2和步進(jìn)電機(jī)的動(dòng)態(tài)特性,電機(jī)單相通電時(shí),角位移的傳遞函數(shù)為:
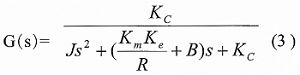
式中,KC、KE、Km分別為常數(shù)、電動(dòng)勢(shì)系數(shù)、轉(zhuǎn)矩系數(shù)。
根據(jù)實(shí)驗(yàn)系統(tǒng)要求選定了步進(jìn)電機(jī)型號(hào),各個(gè)常數(shù)相應(yīng)確定。本實(shí)驗(yàn)系統(tǒng)選用的是Kinco公司的2S86Q-85B8型步進(jìn)電機(jī),其參數(shù)為:保持扭矩 8.5N.m,轉(zhuǎn)子慣量3.4Kg.cm2,額定電流6A/Phase,步進(jìn)角1.8°。將各個(gè)參數(shù)代入式(3)得到對(duì)應(yīng)的角位移傳遞函數(shù)。
2.3 步進(jìn)驅(qū)動(dòng)控制系統(tǒng)的模糊控制研究與仿真分析
在深海采礦測(cè)控實(shí)驗(yàn)系統(tǒng)中,步進(jìn)電機(jī)通過(guò)傳動(dòng)機(jī)構(gòu)驅(qū)動(dòng)模擬集礦機(jī)等部件運(yùn)動(dòng),如果步進(jìn)電機(jī)超調(diào)或者旋轉(zhuǎn)速度大幅度波動(dòng),勢(shì)必影響力學(xué)實(shí)驗(yàn)數(shù)據(jù)的精確度和可靠性。由于步進(jìn)電機(jī)具有內(nèi)部各狀態(tài)變量高度非線性并相互耦合的特性,難以用簡(jiǎn)單的數(shù)學(xué)模型來(lái)進(jìn)行描述,如果采用經(jīng)典的控制理論難以滿足系統(tǒng)的控制要求。模糊控制則不依賴于控制對(duì)象具體的數(shù)學(xué)模型,而是通過(guò)利用模糊集合理論將專家知識(shí)或者熟練操作人員的經(jīng)驗(yàn)形成語(yǔ)言規(guī)則直接轉(zhuǎn)化為控制策略,高效率地做出正確的處理和判斷。因此,對(duì)于步進(jìn)電機(jī)驅(qū)動(dòng)控制系統(tǒng),模糊控制是一種非常合適的選擇。
2.3.1 模糊控制單元結(jié)構(gòu)
深海采礦測(cè)控實(shí)驗(yàn)系統(tǒng)中的步進(jìn)驅(qū)動(dòng)控制系統(tǒng)速度控制單元結(jié)構(gòu)框圖如下所示:
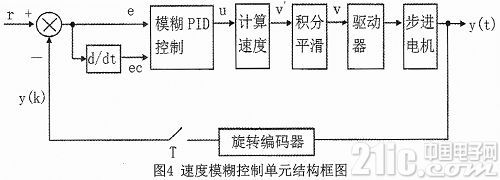
模糊控制系統(tǒng)選用二維控制器,輸入為速度偏差e和偏差變化率△e。PID控制的初始值采用Ziegler-Nichols方法確定。模糊控制單元的輸入是預(yù)定的目標(biāo)速度r,旋轉(zhuǎn)編碼器測(cè)得的步進(jìn)電機(jī)實(shí)際轉(zhuǎn)速作為反饋輸入,然后計(jì)算轉(zhuǎn)速偏差e和偏差變化率ec,經(jīng)過(guò)量化和模糊化后作為模糊控制器的輸入信號(hào),利用模糊規(guī)則判決后輸出模糊控制量,模糊控制量再經(jīng)過(guò)解模糊后輸出步進(jìn)電機(jī)轉(zhuǎn)速的精確增量,與上一個(gè)控制周期的轉(zhuǎn)速相加后輸出。
模糊控制器采用兩輸入單輸出結(jié)構(gòu),兩路輸出控制采用相同的控制規(guī)則表和參數(shù)。經(jīng)過(guò)模糊算法后,實(shí)際輸出速度為v’(k)=v’(k-1)+u(k)。為了有效防止步進(jìn)電機(jī)因?yàn)榭刂屏康耐蛔兌Р剑到y(tǒng)輸出v’需要積分平滑才得到速度v。
2.3.2 模糊控制規(guī)則的選擇
步進(jìn)電機(jī)的模糊控制系統(tǒng)有三個(gè)模糊變量:偏差e、偏差變化率ec和輸出u。一般而言,控制語(yǔ)言的變化值越多,描述就越精確,控制精度也越高,控制效果越好,但過(guò)細(xì)的劃分將會(huì)使控制規(guī)則復(fù)雜,計(jì)算量增加,實(shí)現(xiàn)難度加大。在模糊控制器中,![]() 、
、![]() 和U的模糊子集取相同的語(yǔ)言值,即{NB,NM,NS,ZO,PS,PM,PB},對(duì)應(yīng)的論域[-3,-2,-1, O, 1, 2, 3]。
和U的模糊子集取相同的語(yǔ)言值,即{NB,NM,NS,ZO,PS,PM,PB},對(duì)應(yīng)的論域[-3,-2,-1, O, 1, 2, 3]。
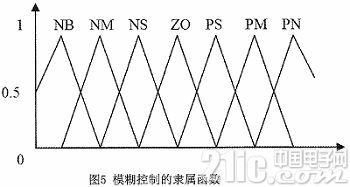
在模糊控制器中,隸屬函數(shù)用于將實(shí)際的輸入量轉(zhuǎn)變?yōu)槟:俊P螤钤蕉傅碾`屬函數(shù)其分辨率越高,控制靈敏度也越高。而形狀越緩的隸屬函數(shù)其控制特性越平穩(wěn),系統(tǒng)穩(wěn)定性越好。在實(shí)際系統(tǒng)中,速度的反饋量都會(huì)含有噪音。因此,隸屬函數(shù)的選擇還應(yīng)考慮反饋量噪音的問(wèn)題。三角形函數(shù)形狀比較簡(jiǎn)單又易于計(jì)算,而且同其它復(fù)雜的隸屬函數(shù)得出的結(jié)果相差很小,具有很好的性能。在本模糊控制器中,![]() 、
、![]() 和U的隸屬函數(shù)均選用三角形函數(shù),如圖5所示。
和U的隸屬函數(shù)均選用三角形函數(shù),如圖5所示。
為了使模糊控制器得到較好的控制效果,當(dāng)速度的偏差較大時(shí),模糊規(guī)則應(yīng)使控制器的輸出盡可能減小偏差;當(dāng)速度的偏差較小時(shí),模糊規(guī)則盡可能維持系統(tǒng)的穩(wěn)定性,盡量避免超調(diào)。
常用的解模糊方法有最大隸屬度法、中位數(shù)法和加權(quán)平均法等等。使用中位數(shù)法的模糊控制器類似于多值繼電器,使用加權(quán)平均法的模糊控制器類似于PI控制器。這兩種方法都優(yōu)于最大隸屬度法。圖6為三種模糊推理和解模糊方法得到的控制結(jié)果示意圖。
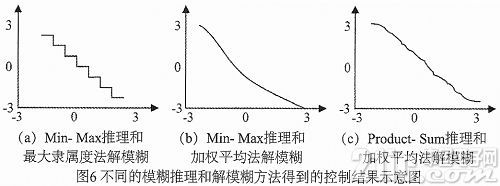
從上圖可以看出,圖(a)的最大隸屬度法具有多值繼電器的特性,不利于系統(tǒng)穩(wěn)定;圖(b)和圖(c)比較接近。模糊推理方法對(duì)模糊控制器性能的影響比解模糊方法小。本模糊控制器采用Min-Max推理和加權(quán)平均法解模糊。
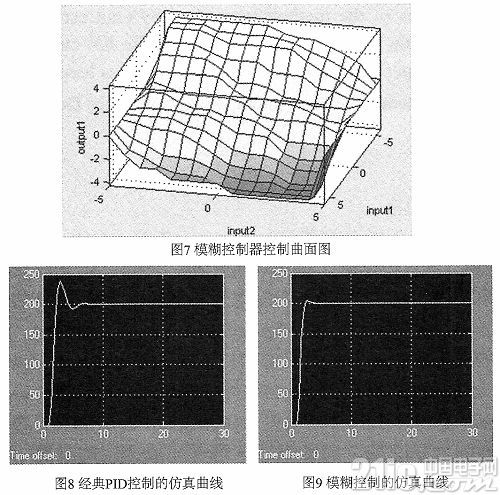
2.3.3 仿真結(jié)果
圖7為模糊控制器的控制效果曲面圖。圖8和圖9為給定速度200轉(zhuǎn)/分,穩(wěn)態(tài)誤差選5%時(shí),分別采用經(jīng)典PID控制器和模糊PID控制器得到的速度仿真曲線。由圖可知,模糊控制的上升時(shí)間略有增加,但超調(diào)量比經(jīng)典PID控制小得多,穩(wěn)定性更好,系統(tǒng)的總體性能大大提高。
3 結(jié)論
本文闡述了深海采礦測(cè)控實(shí)驗(yàn)系統(tǒng)的步進(jìn)驅(qū)動(dòng)系統(tǒng)模糊控制器的仿真分析研究過(guò)程,由對(duì)比仿真結(jié)果可知,采用模糊理論控制具有高度非線性特性的步進(jìn)系統(tǒng)能比較有效地解決振蕩和失步的問(wèn)題。與經(jīng)典PID控制器相比,模糊控制器大大提高了復(fù)雜系統(tǒng)的總體性能,具有良好的控制效果。模糊PID控制策略在步進(jìn)驅(qū)動(dòng)系統(tǒng)中具有很好的實(shí)用性。









評(píng)論