一種可變形飛行器的無人機控制系統設計與實驗

3.2 傳感器
系統采用三對紅外姿態傳感器判斷自身姿態。其原理如圖5所示。本文引用地址:http://www.104case.com/article/159280.htm
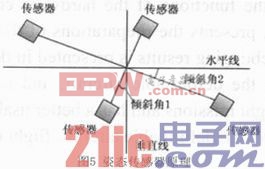
由于天空和大地之間的溫差,它們的紅外輻射波長有差別。系統采用的紅外傳感器對8~15μm波段的紅外輻射敏感,這正是天空和大地的一般熱輻射波長,因此傳感器不會被過熱(如太陽)或過低溫度的物體影響。由一對熱電堆產生的反向電壓經過放大器放大,再經過模數轉換,即可顯示為代表無人機某一方向姿態角的數值。
一般采用三對紅外傳感器。其中垂直方向傳感器的作用是初始化天空與大地的溫差,以確定水平方向傳感器的計算比例。水平方向則有橫向和徑向兩對傳感器,分別計算滾轉和俯仰角度。
3.3 GPS
全球定位系統GPS采用LEA-5H,它的體積小、性能好,位置更新頻率為4Hz。LEA-5H與系統串行接口相連,獲取無人機的飛行速度、高度、經緯度等信息實現實時導航控制。
3.4 調制解調器
調制解調器采用Digi的XBee模塊,XBee的雙向鏈路給飛行中的調整、導航指令傳輸和飛行狀態反饋提供通道。XBee的射程達到40km,所有型號的引腳兼容,和天線一起重量約為2g。
3.5 遙控模塊
遙控模塊包括遙控指令發送機和接受機。遙控指令發送機采用Spektrum DX-7,接收機采用FutabaFASST 7-channel接收機。發送機發送遙控指令,接收機接收遙控指令,并將指令傳送給系統芯片。
4 軟件
軟件架構采用基于UML語言的仿真軟件。UML可以對任何具有靜態結構和動態行為的系統進行建模, 能夠應用于軟件系統開發從需求分析到軟件測試的各個階段,適用范圍極廣。
4.1 飛行仿真配置
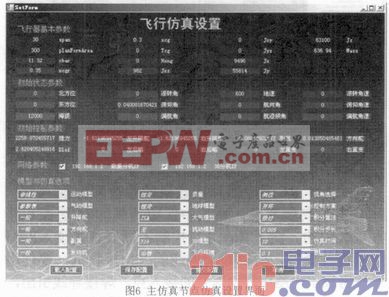
飛行器在實際飛行前需要驗證飛行算法,對飛行仿真進行相應的配置,如圖6所示,主要分為四大部分:飛行器基本參數、初始狀態參數、初始控制參數、模型與仿真選項。
4.2 飛行仿真平臺
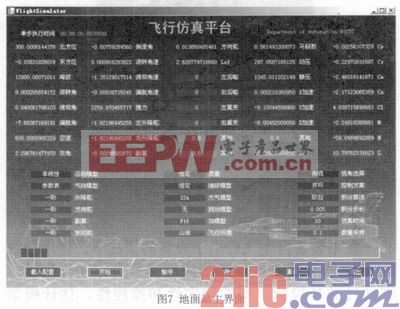
飛行仿真平臺實時觀測飛行器的位置、俯仰角、滾轉角、偏航角等信息。平臺負責飛行中對無人機進行實時控制和監測。
5 控制規律選擇與設計
工程實際中PID控制器應用最為廣泛,本設計采用PID控制器。
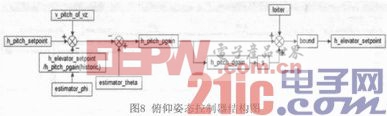
5.1 俯仰姿態控制回路
俯仰姿態控制回路保證飛行器俯仰角在擾動后能以一定的性能保持或者穩定到給定值。該控制回路由俯仰角反饋回路和俯仰角速率反饋回路構成。
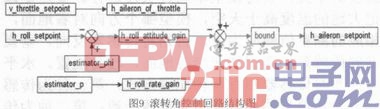
5.2 滾轉角控制回路
滾轉角控制回路的主要作用是當飛行器飛行過程中受到外力時,能夠使飛行器保持固有的滾轉角的控制,飛行器改變方向時也需要滾轉角控制回路的輔助配合。

dc相關文章:dc是什么




評論