基于IRMCK201和ZigBee的圓網(wǎng)印花同步控制系統(tǒng)

3 系統(tǒng)程序設(shè)計
3.1 系統(tǒng)工作流程
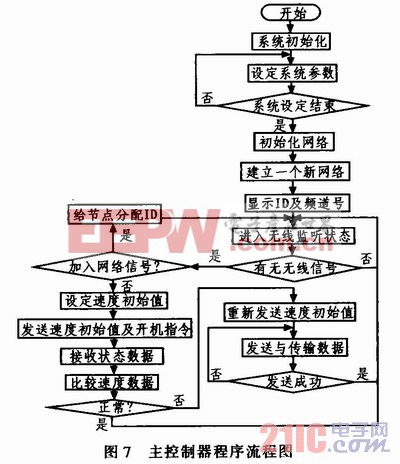
主控制器上電或復(fù)位,首先進行初始化,并建立一個新的網(wǎng)絡(luò),給出網(wǎng)絡(luò)的ID號、頻道號等網(wǎng)絡(luò)信息;然后接受用戶的參數(shù)設(shè)置,再進入無線監(jiān)聽狀態(tài),若空中有無線信號,如果是FRD加入網(wǎng)絡(luò)。則給該加入網(wǎng)絡(luò)的節(jié)點分配網(wǎng)絡(luò)號和ID,直到系統(tǒng)從節(jié)點均加入網(wǎng)絡(luò);當(dāng)接通開始按鍵,主控制器將開始信號及用戶已設(shè)置好的速度值傳輸至各從伺服控制節(jié)點,控制各伺服控制模塊啟動并按設(shè)定的轉(zhuǎn)速運行,同時接收并顯示各伺服控制模塊的工作狀態(tài)信號,圖7為主控制器程序流程圖。本文引用地址:http://www.104case.com/article/156228.htm
3.2 伺服控制模塊的程序流程
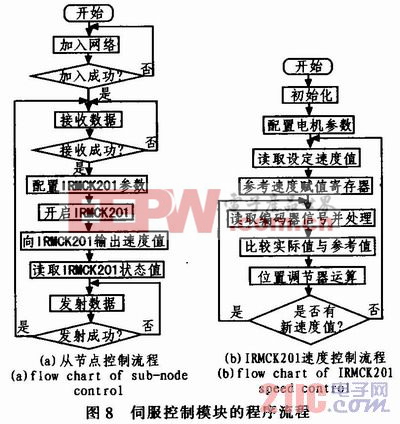
伺服控制模塊的程序流程分為ZigBee從節(jié)點控制流程和IRMCK201速度控制流程。ZigBee從節(jié)點控制流程如圖8(a)所示;IRMCK201速度控制流程如圖8(b)所示。
4 結(jié)束語
本文設(shè)計的基于IRMCK201和ZigBee的圓網(wǎng)印花同步控制系統(tǒng),用其對某型四色機械式圓網(wǎng)印花機進行改造,控制伺服電機的功率為1.5 kW,伺服電機與驅(qū)動輥采用直聯(lián)方式,最高運行車速可達100 m/min,縱向?qū)ň冗_±0.1 mm,圓網(wǎng)與導(dǎo)帶速差可在±8%內(nèi)調(diào)整,印花精度高,對花穩(wěn)定,不跑花,達到了較高的印花精度。
圓網(wǎng)印花同步控制系統(tǒng)利用IRMCK201的硬件電路實現(xiàn)速度環(huán)和電流環(huán)控制,使用ZigBee芯片的實時數(shù)據(jù)傳輸和處理能力,實現(xiàn)了圓網(wǎng)印花主導(dǎo)輥和圓網(wǎng)之間的速度同步和協(xié)調(diào),由于ZigBee網(wǎng)絡(luò)的可擴展性,該系統(tǒng)還可應(yīng)用到較為復(fù)雜的同步控制系統(tǒng)中。













評論