基于DSC的直流電機(jī)半橋驅(qū)動(dòng)電路的設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫查詢
硬件設(shè)計(jì)
本文引用地址:http://www.104case.com/article/147862.htm本系統(tǒng)的半橋驅(qū)動(dòng)電路如圖2所示。其中PWM控制信號(hào)由TMS320F2810的通用定時(shí)器1產(chǎn)生。該信號(hào)在IR2183內(nèi)部通過死區(qū)控制器和電平轉(zhuǎn)換控制邏輯,變?yōu)閮陕穾绤^(qū)切換的互補(bǔ)信號(hào),分別從HO和LO引腳輸出控制半橋的上下兩個(gè)MOS場(chǎng)效應(yīng)管輪流導(dǎo)通。當(dāng)PWM信號(hào)由低變?yōu)楦邥r(shí),LO輸出低電平,關(guān)閉下端開關(guān)管Q2,經(jīng)過一個(gè)死區(qū)時(shí)間后HO輸出高電平,自舉電容C2通過HO放電,驅(qū)動(dòng)上端開關(guān)管Q1開通。電機(jī)電源通過Q1的漏極施加到電機(jī)上,驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)。當(dāng)PWM信號(hào)由高變?yōu)榈蜁r(shí),HO輸出低電平,Q1關(guān)斷,經(jīng)過一個(gè)死區(qū)延時(shí)后,LO輸出高電平驅(qū)動(dòng)Q2開啟,向自舉電容提供充電回路,系統(tǒng)電源通過二極管D1向自舉電容C2充電。當(dāng)PWM信號(hào)保持為低電平時(shí),Q2可保持開通狀態(tài),為電機(jī)提供剎車回路。
在半橋驅(qū)動(dòng)電路和直流電機(jī)之間,串接的電流傳感器將流入電機(jī)的電流量轉(zhuǎn)換為電壓值,提供給DSC的ADCINA0端口進(jìn)行監(jiān)測(cè)。
考慮到MOS場(chǎng)效應(yīng)管關(guān)斷延時(shí)比開啟延時(shí)要長很多,為了縮短關(guān)斷時(shí)的不穩(wěn)定過程,減少開關(guān)損耗,在Q1和Q2的柵極電阻R1和R3上分別并聯(lián)一個(gè)反向的二極管D3和D4。同時(shí),D4還可以避免在上端MOS管Q1快速導(dǎo)通時(shí),下端MOS管Q3的柵極因耦合電壓上升而導(dǎo)致短路現(xiàn)象。
在Q1和Q2都關(guān)斷時(shí),A點(diǎn)處于懸浮狀態(tài),其電位不確定。當(dāng)Q1導(dǎo)通時(shí),A點(diǎn)電位又會(huì)變?yōu)?5V,而要驅(qū)動(dòng)N溝道MOSFET管可靠導(dǎo)通,必須在柵極施加一個(gè)正電壓,使VGD>10~15V。因此,施加在Q1的柵極驅(qū)動(dòng)電壓必須根據(jù)A點(diǎn)電位進(jìn)行浮動(dòng)。IR2183的浮動(dòng)地引腳VS和芯片內(nèi)部的高壓發(fā)生器與外部的自舉二極管和自舉電容一起形成一個(gè)自舉升壓電路,可為Q1提供可靠的導(dǎo)通電壓。本系統(tǒng)中D1和C2串聯(lián)形成了一個(gè)自舉電路。其中D1的電流額定值應(yīng)大于等于MOS場(chǎng)效應(yīng)管的門級(jí)電荷Qg與最高開關(guān)頻率的乘積。若最高開關(guān)頻率為100kHz,則對(duì)于IRF640來說,D1的額定電流值應(yīng)大于5.8mA。同時(shí)為了減小自舉電容C2儲(chǔ)存的電荷損耗,應(yīng)當(dāng)選擇高溫反向漏電流小的超快恢復(fù)二極管。
由于電解電容存在有漏電流的問題,因此要盡量避免使用電解電容作為自舉電容。同時(shí)最小自舉電容的容值可根據(jù)公式1來計(jì)算:
其中:
Qg = 高端MOS場(chǎng)效應(yīng)管的柵極電荷
f = 工作頻率
ICbs(leak) = 自舉電容漏電流
Iqbs(max) = 最大VBS靜態(tài)電流
VCC = 邏輯電路部分的電源電壓
Vf = 自舉二極管的正向壓降
VLS = 低端場(chǎng)效應(yīng)管的導(dǎo)通壓降
VMin = VB與VS之間的最小電壓
Qls = 每個(gè)周期電平轉(zhuǎn)換所需要的電荷(對(duì)于600V的半橋驅(qū)動(dòng)器,該參數(shù)通常為5nC)
系統(tǒng)可靠性設(shè)計(jì)
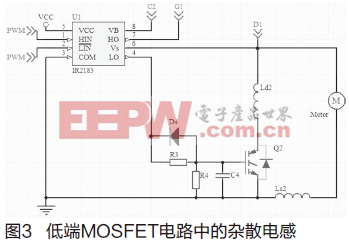
由于直流電機(jī)是感性負(fù)載,因此當(dāng)Q1關(guān)斷時(shí),負(fù)載的電流不能突變,會(huì)轉(zhuǎn)換到由Q2的續(xù)流二極管進(jìn)行續(xù)流。由于在Q2的源極和漏極的電路引線上都存在有雜散電感Ls2和Ld2,如圖3所示。加上續(xù)流二極管的導(dǎo)通延時(shí),導(dǎo)致VS端的電壓會(huì)負(fù)過沖到參考地(COM端)以下。IR2183可保證VS相對(duì)COM端有5V的負(fù)過沖能力。但如果超過5V,IR2183的高端輸出(HO)將被鎖定,而不響應(yīng)輸入信號(hào)的控制。輕者導(dǎo)致電路功能發(fā)生暫時(shí)性的錯(cuò)誤,重則使LO和HO輸出都為高,導(dǎo)致半橋短路而燒毀器件。

pid控制相關(guān)文章:pid控制原理
電路相關(guān)文章:電路分析基礎(chǔ)
dc相關(guān)文章:dc是什么
pwm相關(guān)文章:pwm是什么
pid控制器相關(guān)文章:pid控制器原理
高壓發(fā)生器相關(guān)文章:高壓發(fā)生器原理 電流傳感器相關(guān)文章:電流傳感器原理








評(píng)論