分布式多視角目標跟蹤算法在OMAP3平臺上的實現(xiàn)與優(yōu)化

本系統(tǒng)采用“一種基于最大似然的分布式多視角目標跟蹤算法”[1-5],是復旦大學信息學院數(shù)字信號處理與傳輸實驗室的最新研究成果,本系統(tǒng)在已有跟蹤算法的基礎上進行移植和優(yōu)化裁減,通過序列蒙特卡洛方法[7-8]來具體實現(xiàn)數(shù)據(jù)融合,比較好地解決了視頻跟蹤中常見難題比如遮擋等,取得了較好跟蹤效果。本系統(tǒng)算法具有如下特點:
本文引用地址:http://www.104case.com/article/119685.htm⒈采用魯棒的結(jié)構(gòu)相似度作為匹配程度的度量;
⒉基于最大似然多視角信息融合及遮擋處理;
⒊序列蒙特卡洛方法(粒子濾波);
⒋分布式跟蹤系統(tǒng);
⒌動態(tài)模板更新:抑制漂移的帶掩蔽卡爾曼外觀濾波算法。
3.1 視角內(nèi)模板匹配
本文中單個視角內(nèi)基本跟蹤算法是一種基于模板匹配(Template Matching, TM)技術的跟蹤算法,即在手工選定或自動選定了待跟蹤目標后,提取目標的外觀信息作為模板,在后續(xù)的視頻序列中,將候選圖像區(qū)域與目標模板進行匹配,找到最相似的圖像區(qū)域,作為目標的位置所在。本文中采用結(jié)構(gòu)相似度指數(shù)[6](SSIM)作為模板匹配的指標。SSIM是對于兩幅圖像之間差異的客觀描述,它考慮了很多人類視覺系統(tǒng)的特性。人類視覺系統(tǒng)在提取場景中的結(jié)構(gòu)信息上比較敏感,考慮到這一點,結(jié)構(gòu)相似指數(shù)就是基于結(jié)構(gòu)信息的退化性。
3.2 基于粒子濾波的視角間信息交互
本系統(tǒng)中采用具有分布式特點的多視角目標跟蹤算法。該算法首先對多視角目標跟蹤進行建模,將各攝像機視野中目標位置的估計轉(zhuǎn)化為基于最大似然準則的估計問題,并將似然函數(shù)分解成本地似然函數(shù)和遠程似然函數(shù)乘積的形式。每臺攝像機節(jié)點首先需要利用本地圖像數(shù)據(jù)計算出本地似然函數(shù),再借助于消息傳遞機制計算出遠程似然函數(shù),最后對兩者進行數(shù)據(jù)融合,無須預先進行遮擋檢測,即可完成每臺攝像機對目標的準確跟蹤。
本系統(tǒng)針對多個靜止攝像頭Ci (i=1,2,3?N)觀測待跟蹤目標O,在t時刻任意一臺攝像機采集到的圖像數(shù)據(jù)表示為)...3,2,1( Niit=z,跟蹤目標在該圖像中的真實位置橫縱坐標表示為],[′=ititityxx。整個跟蹤系統(tǒng)的任務是利用該時刻采集到的圖像數(shù)據(jù)集合{}NttttzzzZ...,21=,估計出運動目標在每臺攝像機視野中所處的位置)...2,1(],[Niyxititit=′=x。根據(jù)最大似然準則,可將本文的目標跟蹤任務以如下形式進行建模:
經(jīng)過推導[1]可以得到系統(tǒng)模型似然可分解為如下形式:
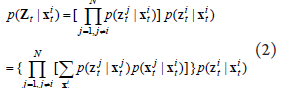
式(2)所表示的物理意義為:本地似然函數(shù))|(ititpxz是第i臺攝像機利用本地數(shù)據(jù)對運動目標位置itx進行估計,可理解為一般的單攝像機跟蹤過程;而遠程似然函數(shù))|(itjtpxz則可以理解為本地攝像機節(jié)點Ci通過一個數(shù)據(jù)融合的過程,融合其它攝像機節(jié)點的觀測數(shù)據(jù)來提高對運動目標的位置itx估計的精度。
本系統(tǒng)采用粒子濾波的形式來實現(xiàn)似然函數(shù)的傳遞,經(jīng)過推導可以得到粒子濾波的權(quán)重中包括了遠程信息及本地信息兩個部分,與公式(2)保持一致,可以很好地實現(xiàn)數(shù)據(jù)融合。










評論