基于RSSI測距和距離幾何約束的節點定位算法

同理,可以求出F點和G點的坐標,假設未知節點M的坐標,利用質心算法得到未知節點M的估計坐標為 :
本文引用地址:http://www.104case.com/article/109140.htm
RDGC-TCL 算法過程
RDGC-TCL 算法包括使用Cayley-Menger行列式給出的距離幾何約束條件對RSSI測量值進行處理來減小測量誤差和利用三角形質心定位算法進行定位。
(1) 錨節點周期性發送自身的信息,信息中包括自身節點ID和自身位置坐標。
(2) 未知節點收到來自錨節點信息時,根據RSSI由強到弱對錨節點進行排序,并建立RSSI與節點到錨節點距離的映射。建立三個集合:
(3) 選取RSSI值大的前幾個錨節點進行計算,并采用距離幾何約束來求得未知節點與錨節點距離的估計值。
(4)在Beacon_set中選擇RSSI值大的錨節點組合成下面的三角形集合,這是提高定位的關鍵。Triangle_set=![]() 對Triangle_set中任一個三角形根據(7)式算出三個交點的坐標,最后由質心算法,得到未知節點坐標。
對Triangle_set中任一個三角形根據(7)式算出三個交點的坐標,最后由質心算法,得到未知節點坐標。
(5)對求出的未知節點坐標集合取平均值,得未知節點坐標。
仿真分析
為了驗證算法的有效性,對定位算法進行仿真。仿真場景為一個120×120的矩形區域,100個節點被隨機放在區域內,其中30個錨節點,70個未知節點。
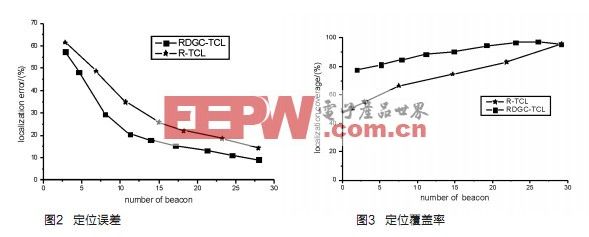
采用距離幾何約束來減少RSSI測距誤差并結合采用三角形質心定位算法(RDGC-TCL 算法),算法性能主要從定位誤差和定位覆蓋率兩方面進行考慮。仿真結果如圖2、圖3所示。
RDGC-TCL 算法在測距校正的過程總增加了計算量和計算時間,但對定位誤差的減小和定位覆蓋率的增加都有了較大的提高。由圖2所示,在錨節點較少的情況下,本文算法的性能提高不大,因為提供校正的測量數據較少,隨著錨節點數目增加,用于校正的測量數據的增加,使得測量的距離更加的準確,使得定位的精度有了較大的提高。圖3表明本文算法相對于R_TCL算法在節點的覆蓋率方面有較大的提高。



評論