機器人技術基礎系列:規(guī)劃與導航

避障
本文引用地址:http://www.104case.com/article/106820.htm路徑規(guī)劃人員僅考慮預先知道的環(huán)境障礙。在路徑執(zhí)行中可能由于地圖精度或動態(tài)環(huán)境等因素,造成機器人真實傳感器的值與預期值之間存在差異。因此,機器人必須能根據(jù)真實傳感器的值實時改變運動路徑。這正是避障能力重要的原因。一些通用的避障方法包括Bug算法、VFH算法。
Bug算法
一種直接的路徑規(guī)劃方法是沿機器人行進路線中每個障礙的輪廓繞行。Bug1算法中,機器人完全沿障礙物輪廓環(huán)繞,并在到 達離目標地點最近的點時分離。這種方法效率低,但能確保機器人到達任何可到達的目標。Bug2算法中,機器人先沿障礙物輪廓行進,當達到可直達目標地點的 位置時立刻分離。Bug2算法顯著縮短了機器人的行進路程,但仍不是最優(yōu)的。
VFH算法
Bug算法的一個限制是機器人每一刻的行為一般為傳感器最近時刻讀數(shù)的函數(shù)。這就可能導致機器人的瞬時傳感器讀數(shù)不能為 穩(wěn)定的避障能力提供足夠的信息。VFH技術通過創(chuàng)建機器人周圍環(huán)境的地圖克服了該限制。在避障時生成極坐標柱狀圖來確定轉向。首先,識別能夠讓機器人通過 的所有通道。然后,執(zhí)行考慮目標方向、輪方向和前一刻方向的代價函數(shù)。
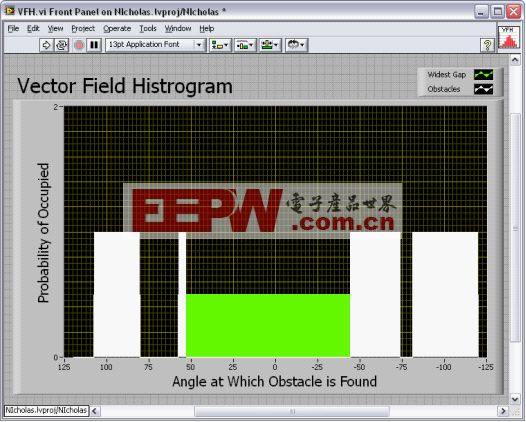
圖2. LabVIEW VI的前面板運行VFH避障算法
在中LabVIEW使用算法
通過LabVIEW用戶可選擇最有效的語法來開發(fā)算法,或使用內置工具來導入其它基于文本語言寫的算法。繼承代碼中已有的搜索算法及其它機器人庫可輕松導入LabVIEW、LabVIEW Real-Time和LabVIEW FPGA中。











評論