機器人技術基礎系列:規(guī)劃與導航

概覽
本文引用地址:http://www.104case.com/article/106820.htm自主移動機器人的規(guī)劃與導航包括利用有目的的抉擇制定和執(zhí)行來使系統(tǒng)實現(xiàn)最高級的目標。機器人是否勝任導航的能力必須通過兩個技能來證明:路徑規(guī)劃和避障。
目錄
1. 路徑規(guī)劃
2. 避障
3. 在中LabVIEW使用算法
路徑規(guī)劃
給定地圖和目的地情況下的路徑規(guī)劃指的是機器人通過軌跡識別行進至目的地的能力。路徑規(guī)劃是至關重要的問題解決能力,因為機器人必須有能力決定在到達目的地前的路程中如何行進。
路徑規(guī)劃可分為兩部分:表達與算法。路徑規(guī)劃人員首先將機器人環(huán)境轉(zhuǎn)化為適合路徑規(guī)劃的形式。一些常用的技術包括廣義的 Voronoi圖、規(guī)則網(wǎng)格和四叉樹。路徑規(guī)劃算法通常可用于幾乎所有配置空間的表達,雖然某些方法會更適合特定表達。圖1展示了LabVIEW中繪制的 Voronoi圖。
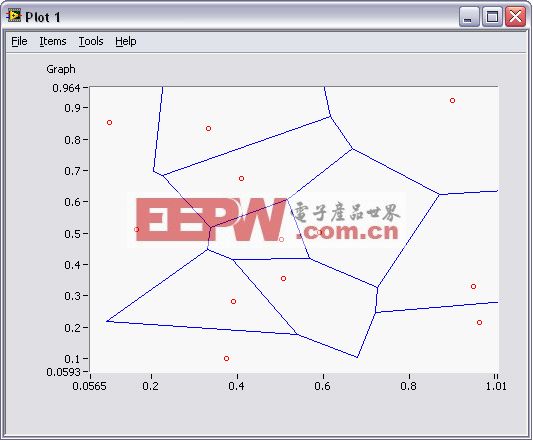
圖1. LabVIEW中的Voronoi圖
由于多數(shù)表達可轉(zhuǎn)換為圖表,初始節(jié)點和目標節(jié)點之間的路徑可通過圖搜索算法來計算。圖搜索算法被計算機科學充分理解,然 而,許多算法要求程序訪問圖上的每個節(jié)點,以此來決定初始節(jié)點和目標節(jié)點間的最短路徑。對于松連通圖來說,訪問每個節(jié)點是容易計算的,如Voronoi 圖;但對于緊連通圖來說計算開銷迅速變大,如規(guī)則網(wǎng)格圖。











評論