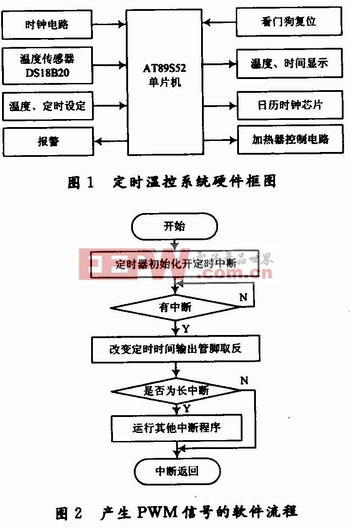
- 在實現定時溫控系統的基礎上,為實現對溫度的精確控制,提出根據溫度傳感器DSl8B20的感溫原理,利用AT89S52的定時器實現脈寬調制(PWM)功能,采用數字PID控制,討論了一種恒溫控制的數字PID控制算法,并通過C51程序實現了單片機的控制系統。使用結果表明,該系統具有控制效果好,精度高,超調量小等優點,且各項性能指標均符合要求。
- 關鍵字:
系統 應用 溫控 算法 PID 控制 數字
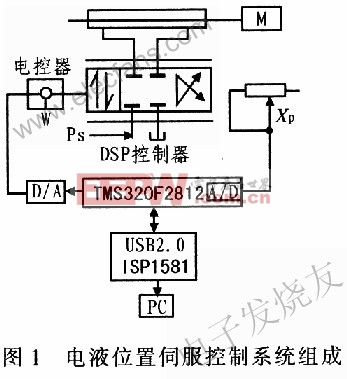
- 電液位置伺服控制系統的典型特征是非線性、不確定性、時變性、外界干擾和交叉耦合干擾等,系統精確的數學模型不易建立。因此,對電液系統的控制一直是一個復雜控制系統問題。 常規PID控制器具有結構簡單、參數
- 關鍵字:
DSP 實現 控制系統 位置 控制器 NNC-PID
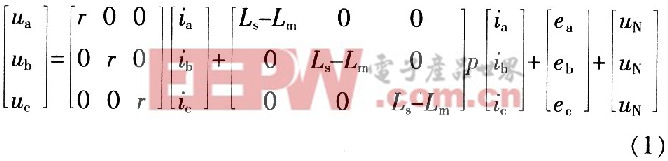
- 為抑制無刷直流電動機的高度非線性和大量隨機擾動,根據模糊優化的PID控制方法設計多變量的無刷直流電機(BLDCM)的控制方案。該控制方案采用模糊算法在線自動整定傳統的PID參數,可用來設計多自由度機器人手臂關節控制器。詳細闡述系統的組成和運行模式。實驗結果表明,該控制方案使系統的響應時間和以前相比縮短50%,超調量降低5%,轉矩擾動減小30%,更能有效地提高系統控制的精確度、柔韌性和魯棒性。
- 關鍵字:
電機 控制 直流 PID 模糊 優化 基于
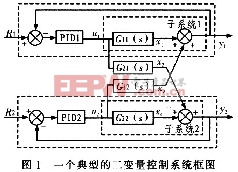
- 現代工業過程中面臨越來越多的結構復雜的多變量系統,傳統的單變量PID控制方法已無法滿足要求,為了解決多變量系統的控制問題,以兩輸入兩輸出系統為例,提出一種基于階躍響應的多變量頻域模型辨識方法,并將此種方法與對角矩陣解耦控制方法相結合應用于多變量PID控制系統中。最后對滯后環節近似部分和對角矩陣解耦方法進行仿真驗證。結果表明該方法能夠更好的控制系統變量,誤差減小50%以上。
- 關鍵字:
解耦 控制 研究 PID 及其 系統 辨識 變量

- 研究普通PID數字控制器在PLC控制系統中的應用,結果表明該算法容易產生誤差積累,從而使得超調量過大,在此基礎上提出增量式PID控制算法。闡述基于三菱FX2N增量式PID控制器設計方法,給出了增量式PID控制算法程序流程圖和部分程序。實驗結果表明,該控制算法既有利于改善系統的動態特性又有利于消除靜差,比普通的PID控制具有更好的控制品質。
- 關鍵字:
控制器 設計 PID 增量 三菱 FX2N 基于
- 各種智能型數字顯示調節儀,一般都具有PID參數自整定功能。儀表在初次使用時,可通過自整定確定系統的最佳P、I、D調節參數,實現理想的調節控制。在自整定啟動前,因為系統在不同設定值下整定的參數值不完全相同,應
- 關鍵字:
PID 數字顯示 調節儀 參數
- 歸一化互相關算法因其圖像匹配穩定性高的特點被廣泛應用于SAR成像和紅外成像的制導系統中。為增強其應用的實時性,討論一種基于TS201處理器,在保證全圖遍歷條件下,結合處理器的自身特性,采用遞推與多模板思想構建的歸一化互相關快速算法。實驗證明,該執行效率常規算法的實現方案有了很大提高,可以實現低對比度條件下的目標精確匹配。
- 關鍵字:
201 TS 快速算法
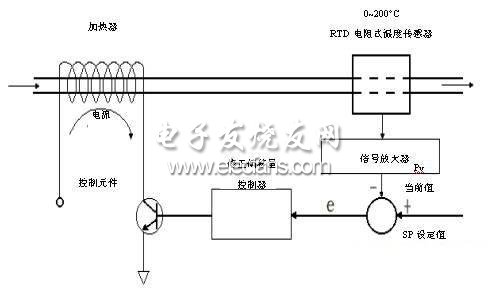
- 針對在工業生產過程中經常需要高穩定度的恒溫環境,傳統模擬式儀表結合簡單的PID控制較難達到目標的情況,提出了基于數字PID控制算法和89C52單片機的溫度控制系統。該系統通過溫度傳感器DSl820對溫度進行采樣和轉換,然后執行數字PID控制,輸出控制量來調節可控硅觸發端的通斷,從而實現對溫度的控制。水溫可以在一定范圍內由人工設定,并能在環境溫度降低時實現自動調整。結果表明:通過將數字PID算法和89C52單片機結合使用,使整個控制系統的溫度控制精度提高了10%,輸出溫度的誤差小于2%,不僅滿足了對溫度控制
- 關鍵字:
溫度 控制系統 單片機 89C52 數字 PID 基于 收發器
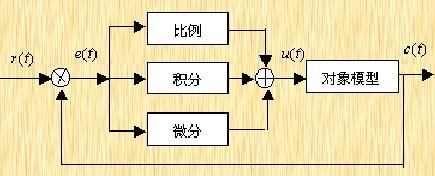
- 電路的功能若對溫度進行控制并要求以最短的時間達到規定的溫度時,可在普通比例控制電路上加上對誤差進行積分的電路,但這樣會隨時間的增加而擴大,面具響應也慢,為了減少誤差,提高速度,在電路中再加上微分元件,
- 關鍵字:
PID OP放大器 溫度 電路

- 神經網絡PID控制器實現了兩種算法本質的結合,借助于神經網絡的自學習,自組織能力,可實現PID參數的在線調整,控制器自適應性好;該算法不要求被控對象有精確的數學模型,擴大了應用范圍,控制效果良好;在合理選擇神經網絡的結構的情況下,該算法有很強的泛化能力。基于以上優點,神經網絡PID控制器具有很好的發展應用前景。
- 關鍵字:
控制器 仿真 PID 神經網絡 BP 基于
- 本文給出了一種基于TS201的多DSP并行系統方案實例。事實上,在多并行系統的設計中,采用網狀松耦網絡結構可使網絡管理更容易,同時也可方便地利用DMA傳輸來將多路信息集中在同一個節點進行運算。其對稱結構也可使配套程序簡單化,還可使多個節點重復利用。因此,本文可以作為設計多DSP并行系統的一種參考。
- 關鍵字:
201 DSP TS 系統設計
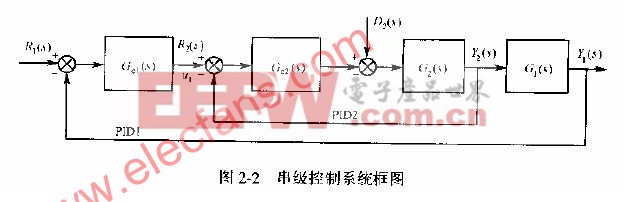
- 串級計算機控制系統的典型結構如下圖所示,系統中有兩個PID控制器,Gc2(s)稱為副調節器傳遞函數,包圍Gc2(s)的內環稱為副回路。Gc1(s)稱為主調節器傳遞函數,包圍Gc1(s)的外環稱為主回咱。主調節器的輸出控制量u1作為
- 關鍵字:
原理 控制 PID 串級
- 前言
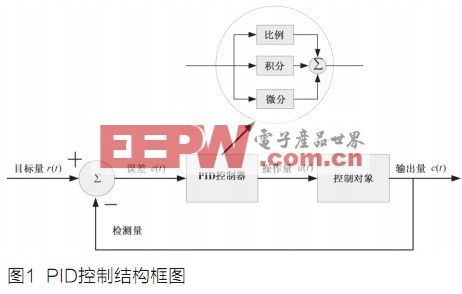
數字PID控制在生產過程中是一種最普遍采用的控制方法,其特點是結構簡單,穩定性好,工作可靠,調整方便,多被應用到被控對象的結構和參數不能完全掌握或得不到精確數學模型的環境中。將數字PID控制算法應用于基站發射功率控制,可以極大地提高基站發射功率的穩定性和可靠性,控制輸出功率在覆蓋允許范圍內,不至過小無法滿足網絡規劃時的覆蓋距離要求,而減少小區覆蓋范圍,又不會產生過強的輸出信號對相鄰基站造成干擾。本文首先分析數字PID控制算法中的兩種常見算法,而后重點討論它們在基于ADUC7026的基站功率
- 關鍵字:
ADI 基站 PID
ts-pid介紹
您好,目前還沒有人創建詞條ts-pid!
歡迎您創建該詞條,闡述對ts-pid的理解,并與今后在此搜索ts-pid的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473