mic-pid 文章 最新資訊
如何實現(xiàn)PID控制
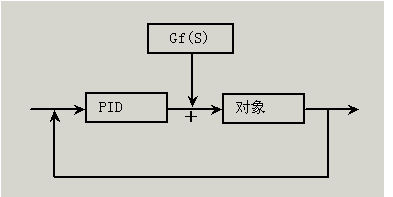
- 在一些系統(tǒng)中,需要進(jìn)行PID控制,如一些板卡采集系統(tǒng),甚至在一些DCS和PLC的系統(tǒng)中有時要擴(kuò)充系統(tǒng)的PID控制回路,而由于系統(tǒng)硬件和回路的限制需要在計算機(jī)上增加PID控制回路。在紫金橋系統(tǒng)中,實時數(shù)據(jù)庫提供了PID控制點可以滿足PID控制的需要。 進(jìn)入到實時數(shù)據(jù)庫組態(tài),新建點時選擇PID控制點。紫金橋提供的PID控制可以提供理想微分、微分先行、實際微分等多種控制方式。 進(jìn)行PID控制時,可以把PID的PV連接在實際的測量值上,OP連接在PID實際的輸出值上。這樣,在實時數(shù)據(jù)庫運行時,就可
- 關(guān)鍵字: PID PLC
PID控制算法之精華
- 1.PID是閉環(huán)控制算法 因此要實現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個電機(jī)的轉(zhuǎn)速,就得有一個測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制路線上,下面也將以轉(zhuǎn)速控制為例。 2.PID是比例(P)、積分(I)、微分(D)控制算法 但并不是必須同時具備這三種算法,也可以是PD,PI,甚至只有P算法控制。我以前對于閉環(huán)控制的一個最樸素的想法就只有P控制,將當(dāng)前結(jié)果反饋回來,再與目標(biāo)相減,為正的話,就減速,為負(fù)的話就加速。現(xiàn)在知道這只是最簡單的
- 關(guān)鍵字: PID 控制算法
基于MEMS慣性傳感器的兩輪自平衡小車設(shè)計
- 著重分析了兩輪自平衡小車的設(shè)計原理與控制算法,采用卡爾曼濾波算法融合陀螺儀與加速度計信號,得到系統(tǒng)姿態(tài)傾角與角速度最優(yōu)估計值,通過雙閉環(huán)數(shù)字PID 算法實現(xiàn)系統(tǒng)的自平衡控制。設(shè)計了以MPU-6050傳感器為姿態(tài)感知的兩輪自平衡小車系統(tǒng),選用8位單片機(jī)HT66FU50A為控制核心處理器,完成對傳感器信號的采集處理、車身控制以及人機(jī)交互的設(shè)計,實現(xiàn)小車自主控制平衡狀態(tài)、運行速度以及轉(zhuǎn)向角度大小等功能。
- 關(guān)鍵字: 兩輪自平衡 姿態(tài)檢測 卡爾曼濾波 數(shù)據(jù)融合 PID 控制器 201603
音圈電機(jī)伺服驅(qū)動器與運動機(jī)構(gòu)設(shè)計
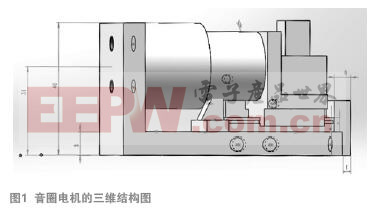
- 為滿足一類音圈直流伺服電機(jī)的高速振動定位精度工作的精度需求,研發(fā)了一種高性能的音圈電機(jī)高精度位置定位設(shè)備。基于ARMCortex M3系列的STM32F103VCT6處理器設(shè)計了音圈直流伺服電機(jī)控制系統(tǒng)。分析了該伺服系統(tǒng)結(jié)構(gòu)的組成,研究結(jié)果表明:設(shè)計的高精度位置伺服系統(tǒng),能滿足位置超調(diào)量小于10 counts,穩(wěn)態(tài)調(diào)整誤差為土1 count的系統(tǒng)參數(shù)指標(biāo)。實現(xiàn)了音圈電機(jī)高速振動下控制器對光柵傳感器實時采集并且高速處理,以及對音圈電機(jī)位置的快速調(diào)整,完成對音圈電機(jī)的高速振動定位精度的控制。
- 關(guān)鍵字: 音圈電機(jī) 伺服控制 PID PWM 201601
PID控制參數(shù)整定常用口訣
- 1. PID常用口訣: 參數(shù)整定找最佳,從小到大順序查,先是比例后積分,最后再把微分加,曲線振蕩很頻繁,比例度盤要放大,曲線漂浮繞大灣,比例度盤往小扳,曲線偏離回復(fù)慢,積分時間往下降,曲線波動周期長,積分時間再加長,曲線振蕩頻率快,先把微分降下來,動差大來波動慢,微分時間應(yīng)加長,理想曲線兩個波,前高后低4比1, 2. 一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會低 3. PID控制器參數(shù)的工程整定,各種調(diào)節(jié)系統(tǒng)中P.I.D參數(shù)經(jīng)驗數(shù)據(jù)以下可參照:溫度T: P=20~60%,T=180~600s,D=3-1
- 關(guān)鍵字: PID
控制器原理

- 導(dǎo)讀:本文主要講述的是控制器的原理,感興趣的童鞋們快來學(xué)習(xí)一下吧~~~很漲姿勢的哦~~~ 1.控制器原理--簡介 控制器,英文名稱為controller,是機(jī)器的核心。其標(biāo)準(zhǔn)定義為:按照預(yù)定順序改變主電路或控制電路的接線和改變電路中電阻值來控制電動機(jī)的啟動、調(diào)速、制動和反向的主令裝置。主要是由程序計數(shù)器、指令寄存器、指令譯碼器、時序產(chǎn)生器以及操作控制器組成的,它是發(fā)布命令的“決策機(jī)構(gòu)”,即完成協(xié)調(diào)和指揮整個計算機(jī)系統(tǒng)的操作。 2.控制器原理--分類 控制器可
- 關(guān)鍵字: 控制器 PID 控制器原理
PID控制器原理

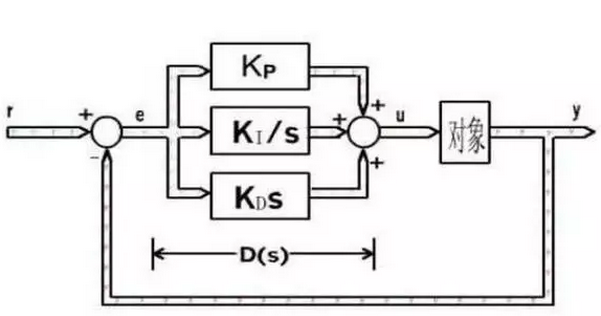
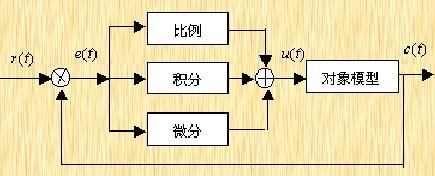
- 導(dǎo)讀:本文主要講述的是PID控制器原理,有興趣的盆友們快來學(xué)習(xí)一下吧~~~很漲姿勢的哦~~~ 1.PID控制器原理--簡介 PID控制器,Proportion Integration Differentiation,即比例-積分-微分控制器。它主要是通過對Kp,Ki以及Kd三個參數(shù)的設(shè)定,用于對基本線性和動態(tài)特性不隨時間變化系統(tǒng)的控制。PID控制器是根據(jù)PID控制原理對整個控制系統(tǒng)進(jìn)行偏差調(diào)節(jié),從而使被控變量的實際值與工藝要求的預(yù)定值一致。不同的控制規(guī)律適用于不同的生產(chǎn)過程,必須合理選擇相應(yīng)的
- 關(guān)鍵字: PID PID控制器原理
基于DSP NNC-PID的電液位置伺服控制系統(tǒng)設(shè)計
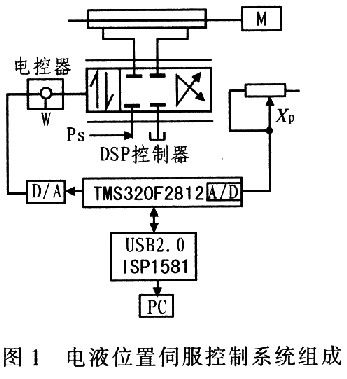
- 在汽車制造過程中,大量應(yīng)用電液位置伺服式機(jī)械手(焊裝、噴漆)、機(jī)床(沖、壓)以及其他加工裝置。電液位置伺服系統(tǒng)具有功率大、響應(yīng)快、精度高的特點,這就要求控制系統(tǒng)不僅有良好的定位精度,而且要有好的伺服跟蹤性能,因此是控制領(lǐng)域中的一個重要組成部分。電液位置伺服控制系統(tǒng)的典型特征是非線性、不確定性、時變性、外界干擾和交叉耦合干擾等,系統(tǒng)精確的數(shù)學(xué)模型不易建立。因此,對電液系統(tǒng)的控制一直是一個復(fù)雜控制系統(tǒng)問題。 常規(guī)PID控制器具有結(jié)
- 關(guān)鍵字: DSP NNC-PID
MIC:今年全球平板處理器出貨將衰退14.6%
- 資策會預(yù)估今年平板電腦處理器出貨成長幅度將由正轉(zhuǎn)負(fù),將比2014年衰退14.6%,2016年再下滑約8%。 資策會MIC發(fā)布最新平板電腦處理器市場預(yù)測,在全球平板電腦市場需求逐漸飽和,以及智慧手機(jī)影響下,今年平板電腦處理器成長幅度將由正轉(zhuǎn)負(fù),預(yù)估出貨將下滑14.6%。 過去幾年平板電腦維持快速成長,連帶推升平板電腦處理器市場,以2011年為例,出貨量比2010年成長327.8%,盡管2012年依舊成長92%,2013年成長69.6%,但2014年急踩煞車,只有成長1.3%共出貨2.42億顆
- 關(guān)鍵字: 平板處理器 MIC
基于ARM單片機(jī)的智能旋轉(zhuǎn)倒立擺系統(tǒng)設(shè)計
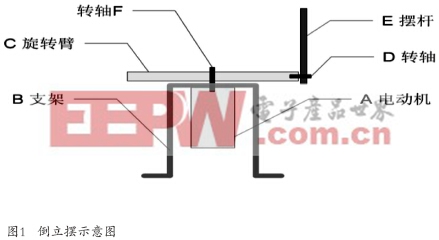
- 1 簡易旋轉(zhuǎn)倒立擺及控制裝置及其功能要求 設(shè)計并制作一套簡易旋轉(zhuǎn)倒立擺及其控制裝置。旋轉(zhuǎn)倒立擺的結(jié)構(gòu)如圖1所示。電動機(jī)A固定在支架B上,通過轉(zhuǎn)軸F驅(qū)動旋轉(zhuǎn)臂C旋轉(zhuǎn)。擺桿E通過轉(zhuǎn)軸D固定在旋轉(zhuǎn)臂C的一端,當(dāng)旋轉(zhuǎn)臂C在電動機(jī)A驅(qū)動下作往復(fù)旋轉(zhuǎn)運動時,帶動擺桿E在垂直于旋轉(zhuǎn)臂C的平面作自由旋轉(zhuǎn)。 1.2 基本要求 (1)擺桿從處于自然下垂?fàn)顟B(tài)(擺角0°)開始,驅(qū)動電機(jī)帶動旋轉(zhuǎn)臂作往復(fù)旋轉(zhuǎn)使擺桿擺動,并盡快使擺角達(dá)到或超過-60°~ +60°; (2)從擺桿
- 關(guān)鍵字: ARM 單片機(jī) PWM PID 旋轉(zhuǎn)臂
基于雙閉環(huán)模糊PID控制器的開關(guān)電源控制
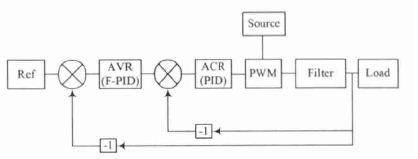
- 電壓調(diào)節(jié)模塊(Voltage Regulator Module,VRM)具有低壓大電流輸出、快速負(fù)載變化響應(yīng)、高輸出穩(wěn)定度等特點,主要應(yīng)用于CPU等對供電電源有特殊要求的集成電路芯片的供電。然而隨著集成電路技術(shù)的迅速發(fā)展,晶體管體積迅速減小、單芯片晶體管數(shù)迅速增加。這樣的半導(dǎo)體制造技術(shù)發(fā)展趨勢已經(jīng)使得集成電路芯片的供電電壓越來越低,負(fù)載電流越來越大,負(fù)載變化速度越來越快、幅度越來越大。集成電路芯片這樣的越來越嚴(yán)酷的供電要求需要VRM的性能有新的提升。同時性能的提升需要傳統(tǒng)控制方法有新的發(fā)展和變化。
- 關(guān)鍵字: PID UC1842
PID控制原理

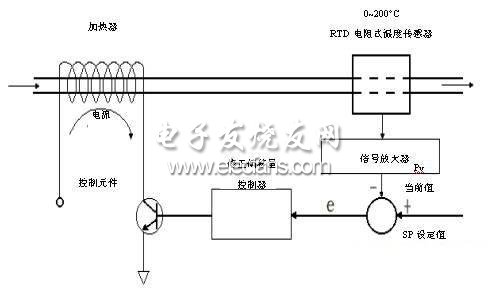
- 導(dǎo)讀:當(dāng)今的閉環(huán)自動控制技術(shù)都是基于反饋的概念以減少不確定性。反饋的要素包括三個部分:測量、比較和執(zhí)行。在工程實際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。 PID控制原理——分類 開環(huán)控制 開環(huán)控制系統(tǒng)(open-loop control system)是指被控對象的輸出(被控制量)對控制器(controller)的輸入沒有影響。在這種控制系統(tǒng)中,不依賴將被控量返送回來以形成任何閉環(huán)回路。 閉環(huán)控制
- 關(guān)鍵字: PID PID控制原理
基于積分分離PID控制的交流伺服系統(tǒng)

- 1 引言 交流電動機(jī)伺服驅(qū)動系統(tǒng)由于其結(jié)構(gòu)簡單、易于維護(hù)的優(yōu)點逐漸成為現(xiàn)代產(chǎn)業(yè)的基礎(chǔ)。其中交流伺服系統(tǒng)在機(jī)器人與操作機(jī)械手的關(guān)節(jié)驅(qū)動以及精密數(shù)控機(jī)床等方面得到越來越廣泛的應(yīng)用。交流伺服系統(tǒng)由交流電動機(jī)組成,交流電動機(jī)的數(shù)字模型不是簡單的線性模型,而具有非線性、時變、耦合等特點,用傳統(tǒng)的基于對象模型的控制方法難以進(jìn)行有效的控制。對于交流伺服系統(tǒng)的性能,一方面要求快速跟蹤性能好,即要求系統(tǒng)對輸入信號的響應(yīng)快,跟蹤誤差小,過渡時間短,且無超調(diào)或超調(diào)小,振蕩次數(shù)少。另一方面,要求穩(wěn)態(tài)精度高,即系統(tǒng)穩(wěn)態(tài)誤
- 關(guān)鍵字: PID 伺服系統(tǒng)
mic-pid介紹
您好,目前還沒有人創(chuàng)建詞條mic-pid!
歡迎您創(chuàng)建該詞條,闡述對mic-pid的理解,并與今后在此搜索mic-pid的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對mic-pid的理解,并與今后在此搜索mic-pid的朋友們分享。 創(chuàng)建詞條
mic-pid電路
mic-pid相關(guān)帖子
mic-pid資料下載
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司