- 電磁設計
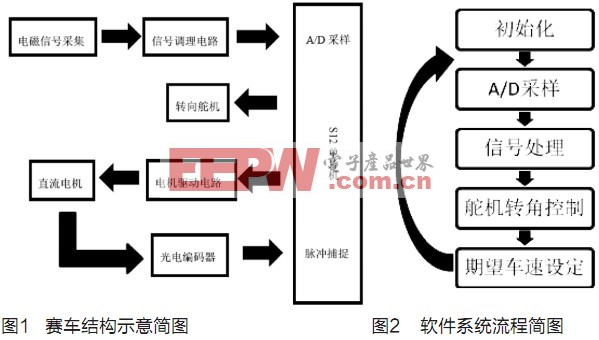
電磁導引智能車,主要包括電磁導引信號獲取、起止線檢測、控制算法三方面,此外,為使智能車擁有更好的性能還對車模進行了一些調整。
電磁導引信號獲取
本設計中電磁信號獲取包括了兩部分:
1. 探頭部分,本設計中使用工字型電感作為探頭,利用它開放的磁芯作為感知交變磁場的媒介,為加強其抗噪性能,選取合適的電感與其串聯組成諧振頻率與信號頻率一致的LC振蕩回路。
2. 信號放大部分,本設計中使用兩級級聯的運放電路作為信號放大部分,兩級放大電路均為帶通放大,參數一致,都具有10
- 關鍵字:
Freescale 智能車 電磁導引 PID
- 摘要:由Buck電路的狀態空間平均法,可得到其電壓控制下的動態小信號模型,并應用PID實現其精確控制。為提高控制精度和抗干擾能力,用模糊控制器對PID參數進行實時整定,給出了仿真與實驗結果及結論。關鍵詞:Buck變
- 關鍵字:
Buck PID 變換器 數字

- 摘要:為實現鋁箔板厚度的精確控制,采用了西門子S7-400PLC為核心的AGC系統,同時把模糊PID控制原理應用于某鋁廠的鋁箔板厚度控制系統,獲得了理想的效果。詳細闡述了AGC的工作原理、系統硬件和軟件設計。實踐表明,
- 關鍵字:
PLC PID

- 0 引言 輪式小車是智能小車機械結構的主體部分,由車身、輪子、速度傳感器、轉動軸等結構部件構成。還包括提供動力的驅動器,采集環境信息的攝像頭等模塊,綜合實現收集小車的自身狀態信息或外部環境信息,并
- 關鍵字:
小車 設計 方案 智能 算法 PID 控制 基于
- 真正要用PID算法的時候,發現書上的代碼在我們51上來實現還不是那么容易的事情。簡單的說來,就是不能直接調用。仔細分析你可以發現,教材上的、網上現行的PID實現的C語言代碼幾乎都是用浮點型的數據來做的,可以想象
- 關鍵字:
算法 PID 實現 如何 C51

- 摘要 步進電機是數字離散電機,特別適用于數字離散控制。但是其數學模型具有高度非線性的特點,PID控制難以實現較高精度性能,本文把模糊控制和PID控制結合起來,根據設置好的誤差范圍,實現自動切換。
關
- 關鍵字:
控制 設計 方案 PID 模糊 電機 位移 步進
- 最近經建會援引聯合國最新數據,并加入臺灣數據分析后發現,臺灣是全球「老得最快」的國家,預計2025年后進入老年人口占總人口比率超過百分之二十的「超高齡社會」,預計在2050年與日本并列為全球最老的兩個國家,65歲以上老年人口占總人口比率,都將高達百分之三十八
- 關鍵字:
3C MIC 資策會
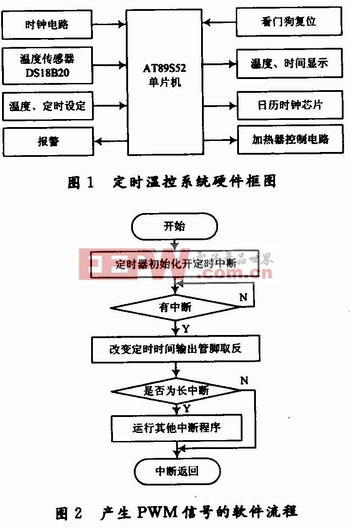
- 在實現定時溫控系統的基礎上,為實現對溫度的精確控制,提出根據溫度傳感器DSl8B20的感溫原理,利用AT89S52的定時器實現脈寬調制(PWM)功能,采用數字PID控制,討論了一種恒溫控制的數字PID控制算法,并通過C51程序實現了單片機的控制系統。使用結果表明,該系統具有控制效果好,精度高,超調量小等優點,且各項性能指標均符合要求。
- 關鍵字:
系統 應用 溫控 算法 PID 控制 數字
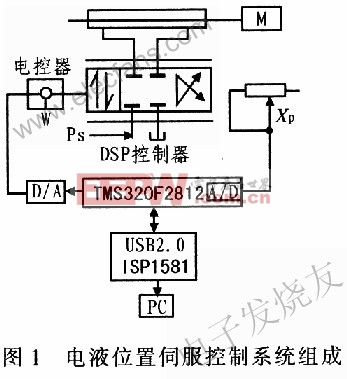
- 電液位置伺服控制系統的典型特征是非線性、不確定性、時變性、外界干擾和交叉耦合干擾等,系統精確的數學模型不易建立。因此,對電液系統的控制一直是一個復雜控制系統問題。 常規PID控制器具有結構簡單、參數
- 關鍵字:
DSP 實現 控制系統 位置 控制器 NNC-PID
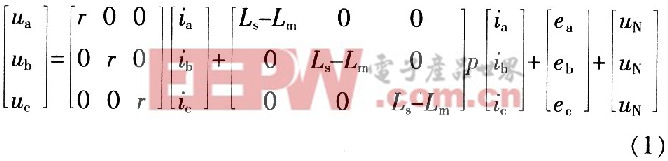
- 為抑制無刷直流電動機的高度非線性和大量隨機擾動,根據模糊優化的PID控制方法設計多變量的無刷直流電機(BLDCM)的控制方案。該控制方案采用模糊算法在線自動整定傳統的PID參數,可用來設計多自由度機器人手臂關節控制器。詳細闡述系統的組成和運行模式。實驗結果表明,該控制方案使系統的響應時間和以前相比縮短50%,超調量降低5%,轉矩擾動減小30%,更能有效地提高系統控制的精確度、柔韌性和魯棒性。
- 關鍵字:
電機 控制 直流 PID 模糊 優化 基于
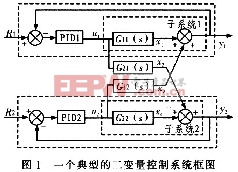
- 現代工業過程中面臨越來越多的結構復雜的多變量系統,傳統的單變量PID控制方法已無法滿足要求,為了解決多變量系統的控制問題,以兩輸入兩輸出系統為例,提出一種基于階躍響應的多變量頻域模型辨識方法,并將此種方法與對角矩陣解耦控制方法相結合應用于多變量PID控制系統中。最后對滯后環節近似部分和對角矩陣解耦方法進行仿真驗證。結果表明該方法能夠更好的控制系統變量,誤差減小50%以上。
- 關鍵字:
解耦 控制 研究 PID 及其 系統 辨識 變量

- 研究普通PID數字控制器在PLC控制系統中的應用,結果表明該算法容易產生誤差積累,從而使得超調量過大,在此基礎上提出增量式PID控制算法。闡述基于三菱FX2N增量式PID控制器設計方法,給出了增量式PID控制算法程序流程圖和部分程序。實驗結果表明,該控制算法既有利于改善系統的動態特性又有利于消除靜差,比普通的PID控制具有更好的控制品質。
- 關鍵字:
控制器 設計 PID 增量 三菱 FX2N 基于
- 各種智能型數字顯示調節儀,一般都具有PID參數自整定功能。儀表在初次使用時,可通過自整定確定系統的最佳P、I、D調節參數,實現理想的調節控制。在自整定啟動前,因為系統在不同設定值下整定的參數值不完全相同,應
- 關鍵字:
PID 數字顯示 調節儀 參數
mic-pid介紹
您好,目前還沒有人創建詞條mic-pid!
歡迎您創建該詞條,闡述對mic-pid的理解,并與今后在此搜索mic-pid的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473