- 內(nèi)容摘要:提出了一種利用數(shù)字濾波器濾除工頻干擾的快速算法。這種算法從AVR單片機(jī)內(nèi)部硬件乘法器的特點(diǎn)出發(fā),采用分配系統(tǒng)數(shù)法進(jìn)行低通數(shù)字濾波器設(shè)計(jì)。經(jīng)過VMLAB集成開發(fā)環(huán)境的仿真驗(yàn)證,算法速度快、代碼效
- 關(guān)鍵字:
快速 算法 干擾 單片機(jī) AVR 基于
- 把遺傳算法和傳統(tǒng)的擾動觀察法相結(jié)合提出了一種新的MPPT算法,并在Matlab中進(jìn)行了仿真。由仿真實(shí)驗(yàn)可以看出,通過遺傳算法的應(yīng)用,該算法具有極好的抗干擾能力和良好的搜索速度,通過減小擾動觀察法的擾動步長,算法可以穩(wěn)定地工作在最大功率點(diǎn)。
- 關(guān)鍵字:
MPPT 算法
- 本文將算法分成了兩個階段,分別設(shè)定了不同的遺傳操作概率,這種方式還比較簡單,不能完全適應(yīng)種群的變化情況。如何讓算法根據(jù)種群進(jìn)化情況自動調(diào)整和優(yōu)化這些參數(shù),還需進(jìn)一步的研究和改進(jìn)。
- 關(guān)鍵字:
算法 路徑 移動機(jī)器人
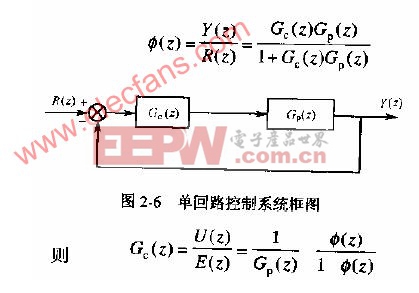
- 早在1968年,美國IBM公司的大林就提出了一種不同于常規(guī)PID控制規(guī)律的新型算法,即大林算法。該算法的最大特點(diǎn)是將期望的閉環(huán)響應(yīng)設(shè)計(jì)成一階慣性加純延遲,然后反過來得到能滿足這種閉環(huán)響應(yīng)的控制器。對于如下圖所示
- 關(guān)鍵字:
原理 算法 控制 大林
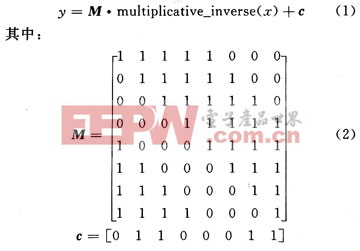
- AES算法中S-box和列混合單元的優(yōu)化及FPGA技術(shù)實(shí)現(xiàn),1 S-box的優(yōu)化設(shè)計(jì)
在AES標(biāo)準(zhǔn)算法中定義了兩個較大的列表。S-box和逆S-box。將S-box用于兩個應(yīng)用:字節(jié)替代和密鑰擴(kuò)展。而逆S-box則用于逆字節(jié)替代。這兩個列表是不相同的,因此必須建立兩個不同的ROM(256×8 b),
- 關(guān)鍵字:
FPGA 技術(shù) 實(shí)現(xiàn) 優(yōu)化 單元 算法 S-box 混合 AES
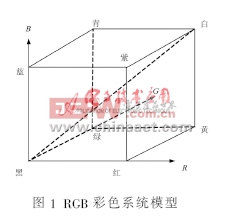
- 通過對青椒RGB模型、顏色因子、直方圖閾值的分析,提出了一種顏色特征與直方圖閾值相結(jié)合進(jìn)行田間青椒圖像分割的方法,該方法無需灰度轉(zhuǎn)換。試驗(yàn)結(jié)果表明,該算法能很好地從圖像背景中分離田間青椒果實(shí),并較好地保存青椒輪廓信息,分割成功率高于85%。進(jìn)一步對分割的圖像進(jìn)行平滑,形態(tài)學(xué)處理,如膨脹、腐蝕等,可以有效消除孔洞現(xiàn)象,有利于對青椒的進(jìn)一步識別。
- 關(guān)鍵字:
青椒 圖像 分割 算法 田間 結(jié)合 顏色 特征 方圖閾 基于 數(shù)字信號
- 針對Single-Sequence的集成電路布圖,在SS編解碼應(yīng)用對芯片中各單元的擺放進(jìn)行優(yōu)化,從而達(dá)到芯片面積利用率最大化。重點(diǎn)介紹了利用SS序列解決不規(guī)則模塊擺放問題,使得SS布圖功能更靈活多變。
- 關(guān)鍵字:
SS序列 集成電路 模塊 算法
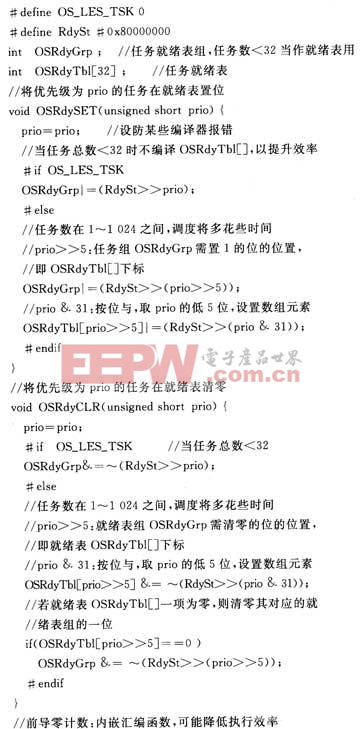
- 根據(jù)μc/Os-Ⅱ就緒表算法在ARM架構(gòu)上的改動, μc/Os-Ⅱ的就緒表設(shè)置、清除、查找算法,是高效的、跨平臺的程序。它使用了兩個查找數(shù)組OSMapTbl[8]和OSUnMapTbl[256],以提高查找就緒表的速度,盡快獲取就緒任務(wù)的最高優(yōu)先級。 Cortex-M3是ARM公司較新的一
- 關(guān)鍵字:
架構(gòu) 改動 ARM 算法 c/Os- 就緒 根據(jù)
- SPIHT算法在醫(yī)學(xué)圖像無失真壓縮中的應(yīng)用, 1 引言
隨著社會的發(fā)展和醫(yī)療技術(shù)的進(jìn)步,人們對身體健康的關(guān)心程度越來越高。醫(yī)學(xué)影像已經(jīng)不再是僅供醫(yī)生參考的信息而成為診斷疾病的重要依據(jù)。在網(wǎng)絡(luò)傳輸條件下的圖像壓縮編碼成為建立數(shù)字化醫(yī)院的關(guān)鍵技
- 關(guān)鍵字:
SPIHT 算法 失真 醫(yī)學(xué)圖像
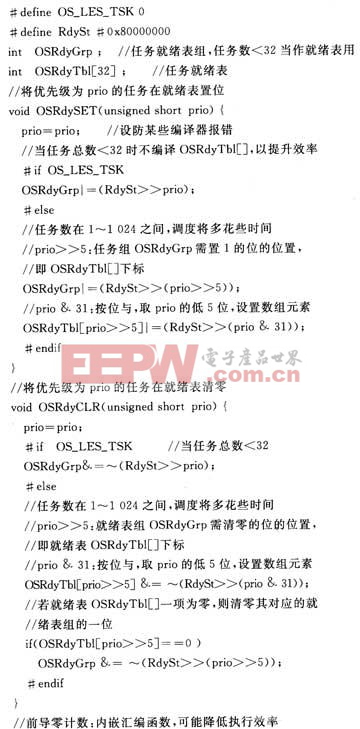
- μc/Os-Ⅱ就緒表算法在ARM架構(gòu)上的改動, Cortex-M3推出時,筆者就認(rèn)定它是單片機(jī)過渡到ARM的有力工具,其小存儲量使得它更適合用小型實(shí)時系統(tǒng)。在學(xué)習(xí)μC/OS-Ⅱ的過程中,發(fā)現(xiàn)其就緒表操作算法經(jīng)過改動或許更好,于是就做了本文所述的試驗(yàn)。
- 關(guān)鍵字:
架構(gòu) 改動 ARM 算法 就緒 c/Os-
- G.723.1算法在DSP上的優(yōu)化,1 引言 G.723.1是刪組織于1996年推出的一種低碼率的語音編碼算法標(biāo)準(zhǔn),也是目前該組織頒布的語音壓縮標(biāo)準(zhǔn)中碼率最低的一種標(biāo)準(zhǔn)。G.723.1主要用于對語音及其它多媒體聲音信號的壓縮,目前在一些數(shù)字音視頻傳輸、高
- 關(guān)鍵字:
優(yōu)化 DSP 算法 G.723.1
- 用DSP優(yōu)化G.723.1算法, 本文詳緇分紹了G.723.1標(biāo)準(zhǔn)的DSP代碼優(yōu)化工作,重點(diǎn)描述了代碼優(yōu)化的方法和本課題的創(chuàng)新點(diǎn).對于算法中的一些函數(shù)提出了獨(dú)創(chuàng)性改寫方法。基于線性匯編的優(yōu)化以及Cache的有效利用使本課題的工作取得了顯著成果,在沒有降低音質(zhì)的情況下,實(shí)現(xiàn)了DSP的語音實(shí)時編解碼。
- 關(guān)鍵字:
算法 G.723.1 優(yōu)化 DSP
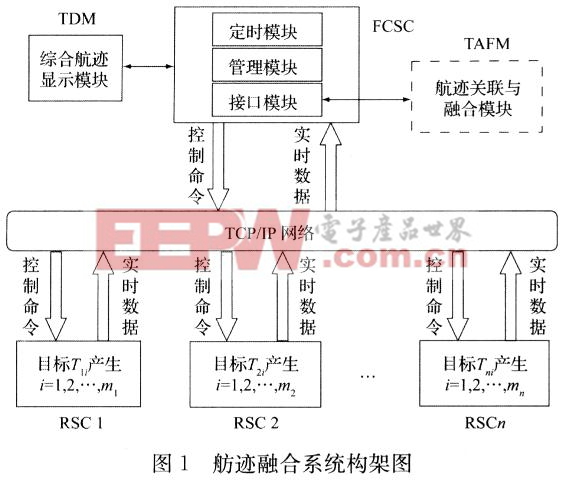
- 雷達(dá)航跡融合算法驗(yàn)證系統(tǒng)設(shè)計(jì),摘要:在雷達(dá)多站點(diǎn)航跡融合算法設(shè)計(jì)中,算法驗(yàn)證是設(shè)計(jì)的關(guān)鍵一環(huán)。所設(shè)計(jì)航跡融合算法驗(yàn)證系統(tǒng)是基于網(wǎng)絡(luò)的分布式計(jì)算機(jī)系統(tǒng),結(jié)合自構(gòu)建模式,可模擬多雷達(dá)站點(diǎn)、多目標(biāo)、異步數(shù)據(jù)傳輸、分布式航跡關(guān)聯(lián)與融合等功
- 關(guān)鍵字:
系統(tǒng) 設(shè)計(jì) 驗(yàn)證 算法 航跡 融合 雷達(dá)
- 0引言
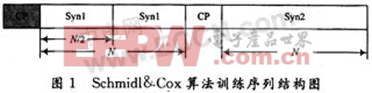
正交頻分復(fù)用(OFDM)是一種多載波調(diào)制方式,其基本思想是把高速率的信源信息流通過串并變換后,變換成N路低速率的并行數(shù)據(jù)流,然后將這N路數(shù)據(jù)流分別調(diào)制到N個相互正交的子載波上并行傳輸?shù)募夹g(shù)。由于OFDM具
- 關(guān)鍵字:
同步 算法 聯(lián)合 OFDM 訓(xùn)練 符號 基于
算法介紹
算法(Algorithm)是一系列解決問題的清晰指令,也就是說,能夠?qū)σ欢ㄒ?guī)范的輸入,在有限時間內(nèi)獲得所要求的輸出。如果一個算法有缺陷,或不適合于某個問題,執(zhí)行這個算法將不會解決這個問題。不同的算法可能用不同的時間、空間或效率來完成同樣的任務(wù)。一個算法的優(yōu)劣可以用空間復(fù)雜度與時間復(fù)雜度來衡量。
算法可以理解為有基本運(yùn)算及規(guī)定的運(yùn)算順序所構(gòu)成的完整的解題步驟。或者看成按照要求設(shè)計(jì)好的有限的確切 [
查看詳細(xì) ]



 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473