雷達航跡融合算法驗證系統設計

摘要:在雷達多站點航跡融合算法設計中,算法驗證是設計的關鍵一環。所設計航跡融合算法驗證系統是基于網絡的分布式計算機系統,結合自構建模式,可模擬多雷達站點、多目標、異步數據傳輸、分布式航跡關聯與融合等功能。驗證實驗表明,該系統能夠實現多站點、多目標的航跡關聯與融合等功能與性能的驗證。
關鍵詞:航跡融合;數據融合;航跡關聯;分布式系統仿真
0 引言
在防空指揮自動化信息處理過程中,由多雷達站點所提供目標信息源,在信息融合中,其航跡融合是關鍵的一個環節。航跡關聯的正確與否,直接關系到其他融合(如數據融合、特征融合、決策融合等)的正確性。在航跡關聯過程中,需要考慮各種各樣情況,如目標屬性、目標特征、威脅度、批號,各雷達站點的情況等,根據相應條件設計關聯與融合算法。如何根據實際任務背景設計仿真各種情況,來有效地驗證目標航跡關聯與融合算法的正確性是有效解決算法驗證的關鍵所在。
本文主要目的旨在對航跡融合算法設計,開發一航跡融合驗證系統,用于檢驗航跡關聯與融合算法的有效性與正確性。
1 驗證系統構架與工作原理
航跡融合驗證系統構架主要由航跡融合中心(FCSC)、站點(RSC)、網絡等組成,如圖1所示。整個系統通過自構建方式將FCSC與每個RSC構成一完整信息交換系統。圖中每個站點為仿真一部雷達的信息輸出裝置,且每個站點可提供多批不同地理位置、不同掃描時間的目標信息。站點的規模可根據實際情況來設置。航跡融合中心將來自各站點目標信息進行關聯與融合,并給出最終的綜合目標航跡。圖中待驗證的“航跡關聯與融合模塊”(TAFM)通過程序“接口模塊”嵌入到FCSC里。
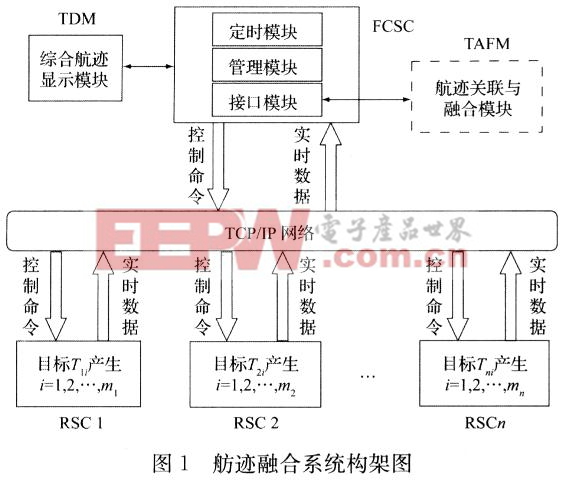
在程序啟動后,融合中心計算機(FCSC)首先向網絡廣播確認信息與本身的系統時間信息。網絡上的所有站點計算機(RSC)在接收到消息后對消息進行地址解析,得到FCSC的IP地址,同時利用FCSC送來的時間信息對自身進行時間調整。然后各RSC再根據IP地址向FCSC發送數據包,將該站點的地理信息告知FCSC。FCSC接收到數據包后,分別對它們進行地址解析,解析出發送數據包RSC的IP地址與相應站點的地理信息。同時給出仿真開始命令,各RSC開始仿真計算,并通過集線器、TCP/IP協議網絡將目標批號、坐標值、屬性、時間等數據送至融合中心。
圖1中,接口模塊是將按照要求所設計的航跡融合模塊中數據格式轉換到融合中心驗證系統所能接受的數據格式。
2 驗證系統軟件設計
2.1 站點坐標系
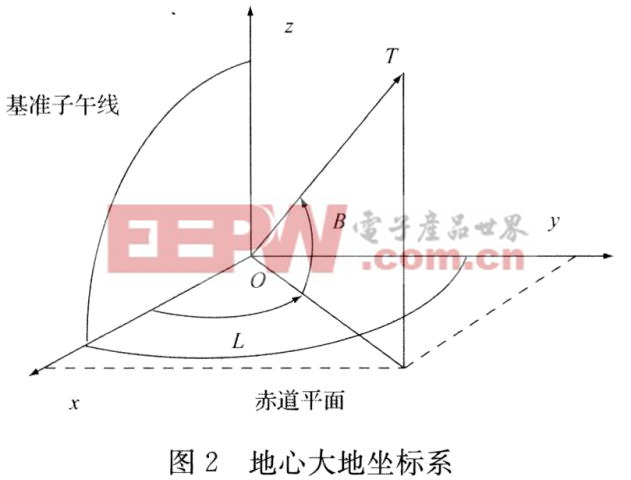
在該驗證系統中,站點坐標系采用地心直角坐標系,如圖2所示。圖中T為站點,O為地心,B、L分別為緯度與經度。采用該坐標系是為各站點之間進行空間校正之用。所有站點的目標坐標值數據均通過地心大地坐標系進行轉換。每個站點的大地坐標值為:(Bi,Li,Hi)i=O,1,2,…,n。當i=O時,為基準站點大地坐標。
站點測量坐標系如圖3所示,O點為站點測量中心,O-XYZ為東北天坐標系,OX-指向大地東方,OY-指向大地北方。
現假定雷達基準方向與Y同向。當然雷達基準可以任意,最后將測得的目標方位角度轉換到O-XYZ坐標上即可。測量站點的球坐標→直角坐標的轉換為:
2.2 站點目標模型產生與輸出定時
2.2.1 目標模型產生
在空中目標模型采用直角坐標進行建立:
式中: 為第j個目標的初始值。
對同一目標,不同站點所處地理位置不同,因而所得到的目標坐標值也不同。為仿真不同地理位置下的目標航跡,需將式(2)的目標轉換到每個站點下的直角坐標:
式中:地球的卯酉圈半徑N與橢球第一偏心率е。(xGj,yGj,zGj)為目標的大地直角坐標值。因此,第i站點第j個目標在各自站點測量直角坐標系下的目標坐標值為:
式中:(為的轉置;(Xi,Yi,Zi)為各站點的大地直角坐標值,由式(4)得到。
同時針對每個目標還有批號Nij、目標屬性Sij(我機、友機、敵機)。不同站點即使針對同一目標,其批號也未必相同,但屬性是唯一的。
2.2.2 目標輸出定時
每個站點計算機在啟動時受融合中心的定時器控制。但不考慮網絡的時延。站點輸出目標坐標值時,同時取該站點的系統時間,與坐標值一起打包送至融合中心。每個站點的數據率根據實際雷達或情報網的情況可設置為:1次/秒、1次/2秒或1次/3秒。
2.3 融合中心模型
2.3.1 空間校準模塊
由于每個站點分別在不同地點,因此,需將每個站點目標的測量坐標值轉換到融合中心的測量坐標系里。在作各站點坐標轉換時,首先將所有站點測得的目標坐標值(ATij,ETij,DTij),轉換到大地直角坐標系(xTij,yTij,zTij)中。然后根據每個站點的(Bi,Li,Hi),i=1,2,…,n,由式(3)將(xTij,yTij,zTij)大地直角坐標系里(xGij,yGij,zGij)。
各站點目標值轉換到大地直角坐標(xGij,yGij,zGij)后,再將其轉換到融合中心(X0,y0,Z0)所在的大地直角坐標系(xGij,yGij,zGij)里。最后由式(5)將其轉換到融合中心的測量坐標系(xij,yij,zij)里。這就完成了各站點目標的坐標轉換:
上述轉換模式比較精確,考慮到了地球的曲率。如果各站點之間距離不大,也可直接進行站點間坐標的直接轉換。但由于上級情報指揮系統可能距雷達站點較遠,因此,需要考慮大地曲面問題。
2.3.2 時間校準模塊
由于每個站點各自定時,沒有一個統一的定時關系,且數據傳輸也需要時間。所以在進行多站點、多目標航跡關聯時,除進行空間校正外,還要進行時間校正,使得各站點的輸出數據統一到一個基準時間上,如采用B碼授時裝置。這就要求每個站點的輸出數據必須帶有絕對時間戳,以便于明確該輸出數據的獲取時刻。由于一般搜索雷達的最小掃描周期為T=1 s,所以,以1 s為航跡關聯周期。各站點數據通過外推歸到統一時刻上tk上,如圖4所示。取兩個標準授時之間為1 s,且tk-tk-1=T,tij(i=1,2,…,n;j=l,2,…,m)分別為第i站點第j個數據輸出時刻。所以外推時間△tij為:
然后進行坐標外推:
因此,所有航跡關聯均在(xPij,yPij,zPij)基礎上完成。
對于周期為2 s的站點數據,還需要進行數據加密處理,使之成為1次/秒的數據率,以便于和T=l s站點的點跡進行關聯,即兩秒之間的時刻坐標插值為:
式中:T=1 s。
2.3.3 綜合航跡顯示模塊
目標空中態勢綜合航跡通過綜合航跡顯示模塊仿真完成,如圖5所示。由待驗證的航跡關聯融合將融合后的目標綜合航跡參數送至綜合航跡顯示模塊,以顯示空中目標的態勢,驗證航跡關聯融合的正確性。圖中給出了6條綜合航跡的顯示,并給每條航跡賦予了批號。圖5中,中心為融合中心,每個環代表一定的距離,在最外環有角度的分劃線。正北為基準角度。
當目標超出最大距離環時,即目標已飛出探測器的威力范圍,不在顯示其航跡。
3 系統仿真與分析
系統仿真伊始,FCSC與各RSC通過系統自構建模式自動建立信息關系,同時各RSC的地理信息(Bi,Li,Hi,i=0,l,2,…,n)也將送至FCSC。
由各RSC里目標航跡模塊所產生的目標信息通過TCP/IP以太網向FCSC傳送,根據輸入的各站點的目標,經由時空校正后,由待驗證航跡關聯融合模塊處理,然后送至綜合顯示模塊。
在仿真過程中,選擇了3個站點,6批目標進行了仿真驗證實驗,如表l所示。站點RSCl可輸出6批目標,RSC2與RSC3可分別輸出6批目標中的3批。6批目標在X-Y平面上的運動關系如圖6所示。其中1~4批號目標平行飛行。
待驗證航跡融合模塊就是將3個站點輸出的目標航跡進行綜合處理,即航跡歸類,得到綜合航跡,如圖5所示,可一目了然航跡融合的正確與否。
4 結束語
該分布式雷達站點航跡融合驗證系統,可用于航跡關聯算法驗證、航跡融合仿真等。具有簡單適用、效果直觀等特點。
將來可擴展到雷達的二次信息處理過程仿真與驗證、防空反導武器系統指揮與控制仿真等方面。







評論