算法 文章 最新資訊
利用FPGA來實(shí)現(xiàn)RC6算法的設(shè)計(jì)與研究
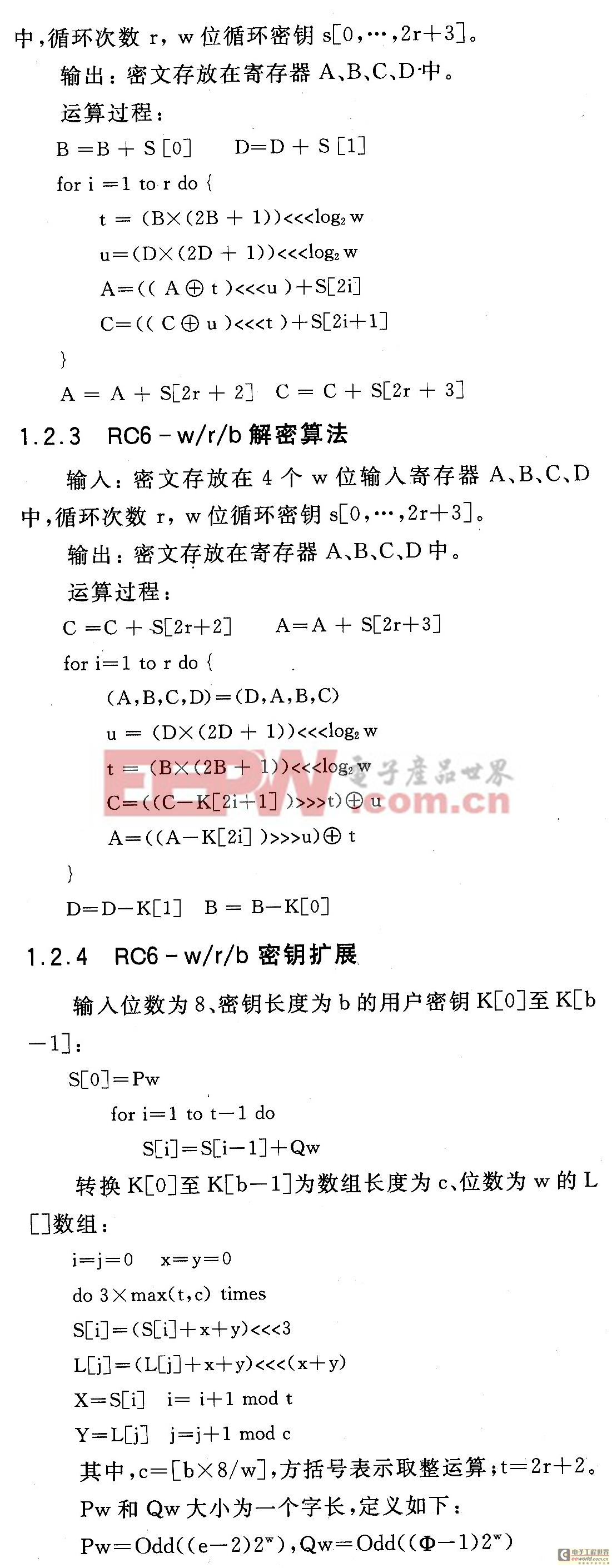
- 利用FPGA來實(shí)現(xiàn)RC6算法的設(shè)計(jì)與研究,引 言 RC6是作為AES(Advanced Encryption Standard)的候選算法提交給NIST(美國(guó)國(guó)家標(biāo)準(zhǔn)局)的一種新的分組密碼。它是在RC5的基礎(chǔ)上設(shè)計(jì)的,以更好地符合AES的要求,且提高了安全性,增強(qiáng)了性能。根據(jù)AES的要求,一
- 關(guān)鍵字: 設(shè)計(jì) 研究 算法 RC6 FPGA 實(shí)現(xiàn) 利用


ITU-TG.729算法及其實(shí)時(shí)實(shí)現(xiàn)
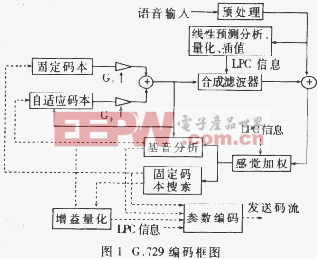
- ITU-TG.729算法及其實(shí)時(shí)實(shí)現(xiàn), G.729編解碼算法,實(shí)時(shí)實(shí)現(xiàn)的G.729系統(tǒng)的軟件設(shè)計(jì)和硬件設(shè)計(jì)。在ADSP-2181上實(shí)現(xiàn)的G.729編解碼器,已經(jīng)通過了ITU-T G.729的全部測(cè)試矢量,并且已經(jīng)在數(shù)字語音記錄儀和H.323網(wǎng)上多媒體通信系統(tǒng)中得到推廣應(yīng)用。 關(guān)鍵
- 關(guān)鍵字: 實(shí)現(xiàn) 實(shí)時(shí) 及其 算法 ITU-TG.729
二進(jìn)制數(shù)折半查找算法在DSP上的實(shí)現(xiàn)
- 二進(jìn)制數(shù)折半查找算法在DSP上的實(shí)現(xiàn),折半查找是采用跳躍躍方式先將順序數(shù)列中的“中間值”與所查詢值進(jìn)行比較,然后按照比值大于或小于“中間值”來判斷所查找數(shù)的甩在區(qū)域。文章給出了將折半算法應(yīng)用于數(shù)字信號(hào)處理器上以實(shí)現(xiàn)二進(jìn)制
- 關(guān)鍵字: 實(shí)現(xiàn) DSP 算法 查找 二進(jìn)制數(shù)
μC/OS-II軟件定時(shí)器管理算法分析及改進(jìn)
- 關(guān)鍵字: 軟件定時(shí)器 算法 μC/OS-Ⅱ ARM

基于MATLAB在FPGA 算法上浮點(diǎn)定點(diǎn)轉(zhuǎn)換的實(shí)現(xiàn)

- 基于MATLAB在FPGA 算法上浮點(diǎn)定點(diǎn)轉(zhuǎn)換的實(shí)現(xiàn),浮點(diǎn)定點(diǎn)轉(zhuǎn)換是在 FPGA 上實(shí)現(xiàn)算法時(shí)最困難的地方(圖 1)。雖然 MATLAB 是一種強(qiáng)大的運(yùn)算開發(fā)工具,但其許多優(yōu)點(diǎn)卻在浮點(diǎn)定點(diǎn)轉(zhuǎn)換過程中被降低了。例如,由于定點(diǎn)算術(shù)中精度較低,新的數(shù)學(xué)誤差被引入算法。您必須重
- 關(guān)鍵字: 定點(diǎn) 轉(zhuǎn)換 實(shí)現(xiàn) 浮點(diǎn) 算法 MATLAB FPGA 基于
C51如何實(shí)現(xiàn)PID算法
- 真正要用PID算法的時(shí)候,發(fā)現(xiàn)書上的代碼在我們51上來實(shí)現(xiàn)還不是那么容易的事情。簡(jiǎn)單的說來,就是不能直接調(diào)用。仔細(xì)分析你可以發(fā)現(xiàn),教材上的、網(wǎng)上現(xiàn)行的PID實(shí)現(xiàn)的C語言代碼幾乎都是用浮點(diǎn)型的數(shù)據(jù)來做的,可以想象
- 關(guān)鍵字: 算法 PID 實(shí)現(xiàn) 如何 C51
算法介紹
算法(Algorithm)是一系列解決問題的清晰指令,也就是說,能夠?qū)σ欢ㄒ?guī)范的輸入,在有限時(shí)間內(nèi)獲得所要求的輸出。如果一個(gè)算法有缺陷,或不適合于某個(gè)問題,執(zhí)行這個(gè)算法將不會(huì)解決這個(gè)問題。不同的算法可能用不同的時(shí)間、空間或效率來完成同樣的任務(wù)。一個(gè)算法的優(yōu)劣可以用空間復(fù)雜度與時(shí)間復(fù)雜度來衡量。
算法可以理解為有基本運(yùn)算及規(guī)定的運(yùn)算順序所構(gòu)成的完整的解題步驟。或者看成按照要求設(shè)計(jì)好的有限的確切 [ 查看詳細(xì) ]
算法電路



算法相關(guān)帖子
算法資料下載
算法專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司