使用NI LabVIEW軟件最大的好處是可以設計且自定義圖形化用戶界面.
作者:
Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab
行業:
Manufacturing, 電子
產品:
LabVIEW, 機器視覺附件
挑戰:
用短批次和多樣化的產品為裝配電子元件設計一個緊密集成有機器人技術和視覺技術的系統
解決方案:
在NI視覺系統的指導下,用
關鍵字:
NI LabVIEW 機器人
使用iPAM系統的病人接受上肢治療運動
作者:
Andrew Jackson - University of Leeds
Peter Culmer - University of Leeds
Martin Levesley - University of Leeds
Sophie Makower - Leeds Primary Care NHS Trust
Bipinchandra Bhakta - Leeds Institute of Molecular Medi
關鍵字:
NI LabVIEW 機器人
概覽
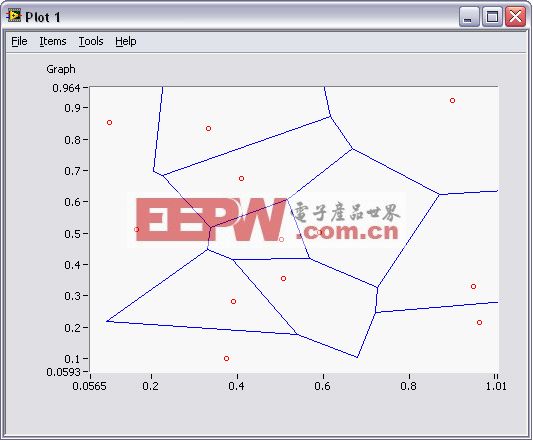
自主移動機器人的規劃與導航包括利用有目的的抉擇制定和執行來使系統實現最高級的目標。機器人是否勝任導航的能力必須通過兩個技能來證明:路徑規劃和避障。
目錄
1. 路徑規劃
2. 避障
3. 在中LabVIEW使用算法
路徑規劃
給定地圖和目的地情況下的路徑規劃指的是機器人通過軌跡識別行進至目的地的能力。路徑規劃是至關重要的問題解決能力,因為機器人必須有能力決定在到達目的地前的路程中如何行進。
路徑規劃可分為兩部分:表達與算法。路徑規劃人員首先將機器人
關鍵字:
NI LabVIEW 機器人
概覽本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規劃,您都可以使用這個產品來設計新一代的復雜的自動化系統。LabVIEW機器人模塊帶有全新的功能完備的“機器人”選板,其中包含了設
關鍵字:
LabVIEW API 機器人模塊 機器人
智能輪式移動機器人嵌入式控制系統設計,為了優化智能輪式移動機器人的控制系統,提出了一種基于ARM微處理器和復雜可編程邏輯器件(CPLD)的嵌入式控制系統。硬件部分采用以ARM和CPLD為核心的模塊化設計,軟件部分采用實時操作系統μC/OS?鄄Ⅱ,并設計了電機速度調節的控制算法。實現了對機器人驅動電機、超聲傳感等任務模塊的系統控制。仿真和運行實驗結果表明,系統運行穩定,控制靈活,達到預期的設計目標。
關鍵字:
控制系統 設計 嵌入式 機器人 輪式 移動 智能 數字信號
輪式移動機器人是機器人研究領域的一項重要內容.它集機械、電子、檢測技術與智能控制于一體。在各種移動機構中,輪式移動機構最為常見。輪式移動機構之所以得到廣泛的應用。主要是因為容易控制其移動速度和移動
關鍵字:
控制系統 設計 機器人 輪式 自動 單片機
Author(s):
關鍵字:
RoboCup 仿人機器人 美國 機器人
關鍵字:
CompactRIO LabVIEW FIRST 機器人
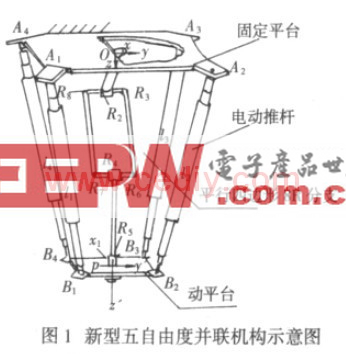
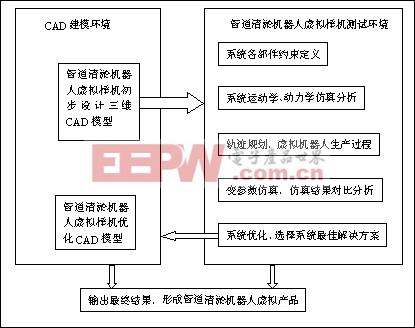
隨著國民經濟的迅速發展,環境污染日益嚴重,環保問題越來越受到社會各界的普遍關注。城市污水排放是確保環境衛生、建設現代化文明城市的重要一環。目前,我國絕大多數城市排水管道的清淤工作仍普遍處于人工作業
關鍵字:
機器人 虛擬 樣機 設計 清淤 管道 pro/e 中小型 排水
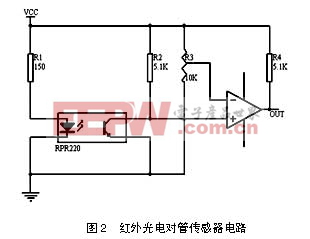
一種嵌入式智能尋跡機器人設計,1 引言 在信息技術的飛速發展,計算機,通訊、消費電子三種技術合一的后PC的時代,雖然計算機和網絡已經全面滲透到日常生活的每一個角落,但各種各樣的新型嵌入式接入設備已經成為當前的主流產品。任何一個普通人
關鍵字:
設計 機器人 智能 嵌入式 嵌入式
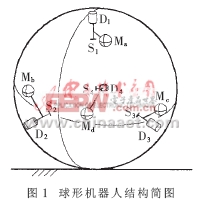
針對新型球形機器人驅動機構的特點,介紹了一種基于DSP的開環控制器軟硬件系統的設計方法,給出了系統的硬件電路、開環控制模型以及軟件控制流程。
關鍵字:
控制器 設計 機器人 球形 DSP 新型 基于
基于ARM7的遠程機器人控制系統的研制,1 總體方案設計
關鍵字:
控制系統 研制 機器人 遠程 ARM7 基于 機器人控制裝置 ARM 89C52
機器人“護士”介紹
您好,目前還沒有人創建詞條機器人“護士”!
歡迎您創建該詞條,闡述對機器人“護士”的理解,并與今后在此搜索機器人“護士”的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473