- 提出了一種以CAN總線為通信工具,DSP芯片為控制器的主處理器和雙位置傳感器的反饋結構,其配合主控計算機和底層控制器雙層反饋的控制方式,可適于仿人步行機器人的分布式運動控制系統.整個控制系統結構靈活、功能強大、工作穩定可靠,可以顯著提高仿人機器人的運動性能.
- 關鍵字:
運動 控制系統 研究 機器人 傳感器 CAN 總線 基于 CAN
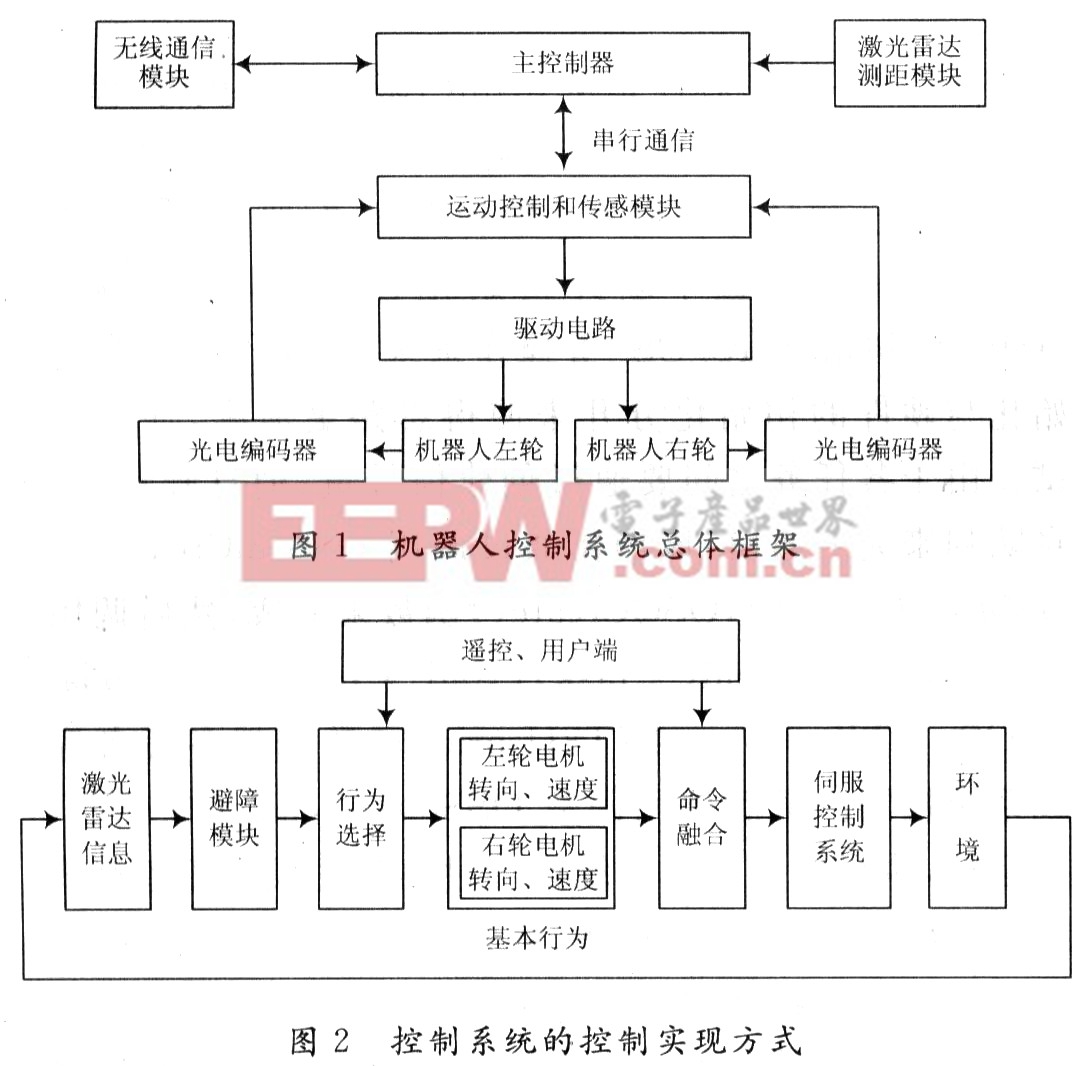
- 根據激光雷達跟蹤測量定位理論,介紹一種基于μC/OS-Ⅱ的實時機器人控制系統。該控制系統采用分層分布式控制系統設計方案,主控制模塊以S3C44BO為硬件平臺,并以μC/OS-Ⅱ為軟件平臺,通過多任務劃分,將整個系統功能分成多個按不同優先級的調度任務,以實現機器人不同功能的需求。伺服控制模塊以TMS320F2812為控制器,并以PID為控制決策算法。性能測試表明,該控制系統控制精度高,穩定性好,系統響應迅速。
- 關鍵字:
控制系統 設計 機器人 雷達 激光 基于 轉換器

- 本文所設計實驗,已經考慮較苛刻的時間及環境閃素,能說明整個系統具有良好的實時性。該實時控制方案的可行,有效降低了雙臂單腿跳躍機器人控制系統的開發難度和成本,是關鍵的階段性成果。
- 關鍵字:
控制 技術 研究 實時 機器人 單腿 跳躍 雙臂 CAN
- 引 言
智能尋跡機器人是一種被廣泛研究的機器人,而且國內外都有許多重要的比賽都以尋跡機器人為核心展開,如我國的“飛思卡爾”杯全國大學生智能車大賽,以及吸引亞太地區眾多國家參賽的亞廣聯(ABU)機器人大賽
- 關鍵字:
系統 三點三輪 機器人 路線 復雜 傳感
- 如果你見到美國貝勒大學醫學中心的機器人“貝西”,或許有身處未來的感覺。它已帶領人們提前進入未來世界,享受前沿科學成果。有了它,醫生可以在世界任何地方為千里之外的病人做檢查,和病人進行“面對面”交流,實現遠程巡診。
醫生只要接入無線寬帶網絡,就可以使用普通個人電腦與巡診機器人保持聯絡。他們可以用操縱桿控制機器人移動,調整安裝在機器人頭部的屏幕和攝像機角度。
醫生可以通過機器人觀察病人,向病人詢問病情,檢查心跳及脈搏,甚至進行X射線透視。病人可以
- 關鍵字:
醫療電子 機器人
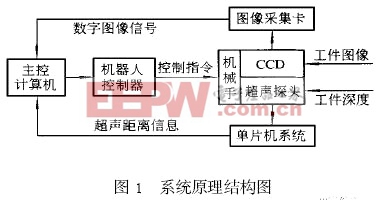
- 視覺傳感器能直觀反映物體的外部信息,但單個攝像頭只能獲得物體的二維圖像,立體視覺雖能提供三維信息,但對于外形相同,僅深度有差別的物體難以識別(如有孔物體、階梯狀物等) ,且對環境光線有一定的要求. 由于超聲傳
- 關鍵字:
自動識別 系統 機器人 技術 視覺 超聲 基于
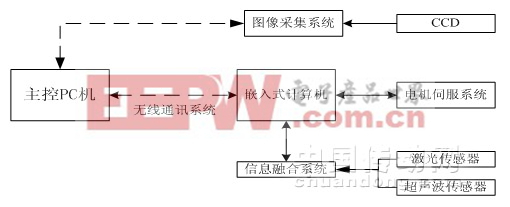
- 介紹了一種為機器人添加視覺模塊而進行智能導航的設計。主要通過為廣茂達AS-UII型機器人添加無線模塊將圖像信息發至計算機,經圖像處理后對機器人進行遙控操作達到閉環控制的目的。此設計價格低廉、運行穩定。
- 關鍵字:
導航 機器人

- 松下EVOLTA電池驅動的三輪機器人于8月6日在法國勒芒賽中第二次打破吉尼斯世界紀錄。該電池在2008年1月首次打破世界紀錄并被譽為“最持久耐用的AA堿性電池”。干電池驅動機器人在挑戰勒芒24小時耐力賽中跟隨著引導車的紅外線,裝置在參賽機器人背部的2節AA干電池驅動它不停地蹬動三輪車的腳踏板,圍 繞著勒芒賽4.2千米的賽道24小時內行駛了5.6圈,約23.726千米即14.82英里。吉尼斯世界紀錄將其譽為“距離最長的電池驅動遙控模型車”。 這款包含三輪車
- 關鍵字:
松下 機器人 電池

- 超聲波并不是測量機器人與物體間距離的唯一方法,也可以利用紅外線。和超聲波測量不同,紅外線距離傳感器不會去探測線光束的傳播時間。因為對于我們感興趣的距離,傳輸時間為10―15―10-12秒數量級。只有那些
- 關鍵字:
測量 距離 紅外線 機器人 基于
- 引 言
隨著人口的老齡化和社會福利制度的完善,導致勞動力成本的急劇上升,一些簡單的重復性的體力勞動為服務機器人提供了廣闊的市場。清潔機器人是服務機器人的一種,可以代替人進行清掃房間、車間、墻壁等。
- 關鍵字:
設計 控制系統 機器人 吸塵 ARM
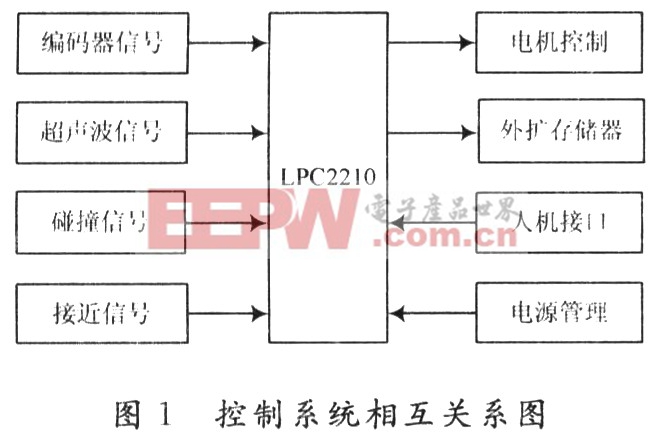
- 0 引 言 移動機構是清潔機器人的主體,決定了清潔機器人的運動空間,一般采用輪式結構。傳感器系統一般采用超聲波傳感器、紅外光電傳感器、接觸傳感器等構成多傳感器系統。隨著近年來控制技術、傳感技術以及移
- 關鍵字:
機器人 測控系統
- 本文采用了無線射頻識別技術、紅外線距離傳感技術和地磁感應電子羅盤相結合的方法,設計出了一種基于DSP控制的信息融合的自主移動的機器人的導航與控制系統。
并且在設計的過程中根據實際情況的需要,
- 關鍵字:
設計 研究 控制系統 導航 導購 機器人 RFID
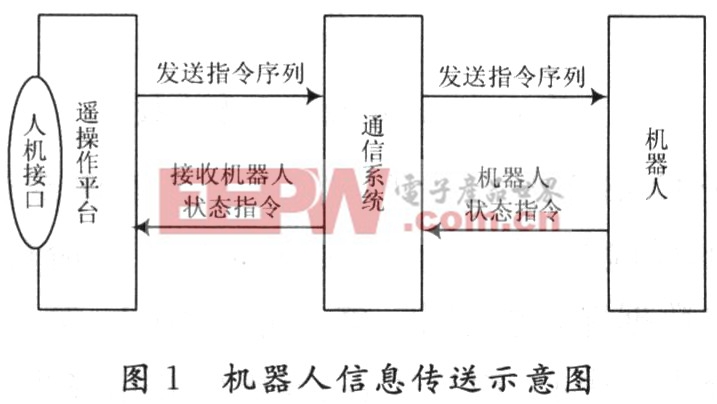
- 摘 要:針對移動機器人的遠程操作問題,基于C++Builder軟件環境,設計和實現了一種移動機器人的遙操作接口系統,可利用方向盤、鍵盤和鼠標來操作機器人的移動。基于此接口系統建立了遙操作系統原型,并且進行了室內
- 關鍵字:
設計 實現 系統 接口 機器人 操作 移動
- 排爆機器人控制與無線通訊系統,引言 排爆機器人屬于搬運機器人的一種類型,很多搬運機器人是模仿人類的動作,用來幫助或部分代替人來進行繁重、危險、重復等工作。排爆機器人模仿人類的行走、抓取物體的動作,可以被用來排除現場的爆炸物。排爆
- 關鍵字:
通訊系統 無線 控制 機器人 排爆 排爆機器人 控制系統 網絡化 Linux
機器人“護士”介紹
您好,目前還沒有人創建詞條機器人“護士”!
歡迎您創建該詞條,闡述對機器人“護士”的理解,并與今后在此搜索機器人“護士”的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473



