基于電磁場檢測的尋線智能車設計
——

本設計中順著電流方向豎直放置線圈,這是由于對于放置在導線上方h處的,與導線水平距離為x的線圈(如圖4示)中產生的感應電動勢大小與![]() 成正比,其中q是傳感器所在平面與導線的夾角。由于車身可能會與導線成一定的夾角,因此q不一定為0。
成正比,其中q是傳感器所在平面與導線的夾角。由于車身可能會與導線成一定的夾角,因此q不一定為0。
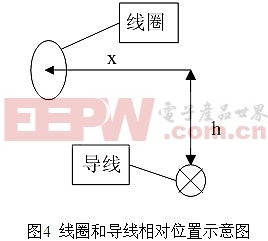
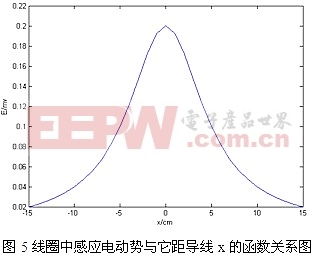
圖5是按照q=0o,h=5cm時畫出的線圈中感應電動勢與導線的水平距離x 的關系,可以看出豎直放置的線圈中的感應電動勢分布簡單,衰減快,遠處對近處的干擾小,非常適合作為檢測小車當前位置的傳感器。
對于直導線,當裝有小車的中軸線對稱的兩個線圈的小車沿其直線行駛,即兩個線圈的位置關于導線對稱時,則兩個線圈中感應出來的電動勢大小應相同、且方向亦相同。若小車偏離直導線,即兩個線圈關于導線不對稱時,則通過兩個線圈的磁通量是不一樣的。這時,距離導線較近的線圈中感應出的電動勢應大于距離導線較遠的那個線圈中的。根據這兩個不對稱的信號的差值,即可調整小車的方向,引導其沿直線行駛。
對于弧形導線,即路徑的轉彎處,由于弧線兩側的磁力線密度不同,則當載有線圈的小車行駛至此處時,兩邊的線圈感應出的電動勢是不同的。具體的就是,弧線內側線圈的感應電動勢大于弧線外側線圈的,據此信號可以引導小車拐彎。
另外,當小車駛離導線偏遠致使兩個線圈處于導線的一側時,兩個線圈中感應電動勢也是不平衡的。距離導線較近的線圈中感應出的電動勢大于距離導線較遠的線圈。由此,可以引導小車重新回到導線上。
由于磁感線的閉合性和方向性,通過兩線圈的磁通量的變化方向具有一致性,即產生的感應電動勢方向相同,所以由以上分析,比較兩個線圈中產生的感應電動勢大小即可判斷小車相對于導線的位置,進而做出調整,引導小車大致循線行駛。












評論