手機基于DTMF控制器控制機器人車輛

在這個項目中,我將向你展示如何設計一個可以用電話控制的簡單機器人車。這個項目被稱為 "DTMF控制的機器人",不使用微控制器。
本文引用地址:http://www.104case.com/article/202305/446151.htm簡介
DTMF是Dual Tone Modulation Frequency的首字母縮寫。本文對基于DTMF技術的機器人車進行了解釋。這里,是一個不使用微控制器就能操作機器人的電路。這個電路由簡單的DTMF音頻解碼器和一個電機驅動IC組成。

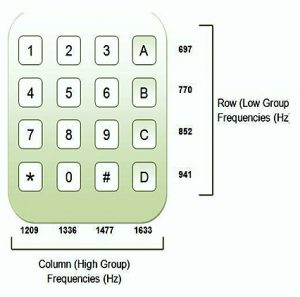
當我們的手機按下一個鍵時,會產生一個音調,它是兩個頻率的組合。在這兩個頻率中,一個是高頻率,另一個是低頻率。這個頻率可以由解碼器IC解碼為二進制序列。使用這個二進制序列,機器人被控制。
基于DTMF的機器人車輛電路原理
基于DTMF的機器人車電路由DTMF解碼器IC、電機驅動器IC(L293D或L298N)、電機和一個簡單的機器人底盤組成,以容納所有這些部件。
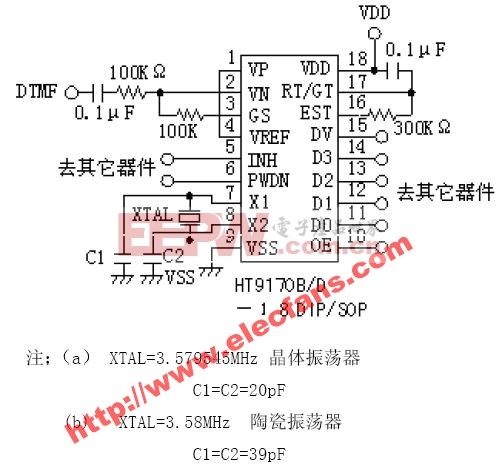
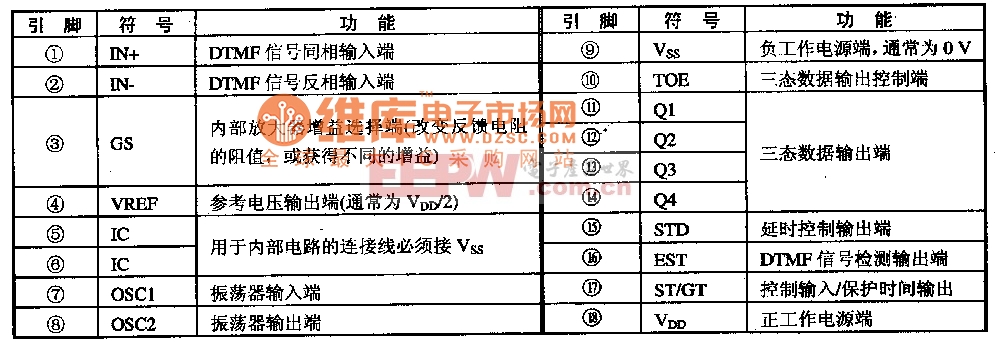
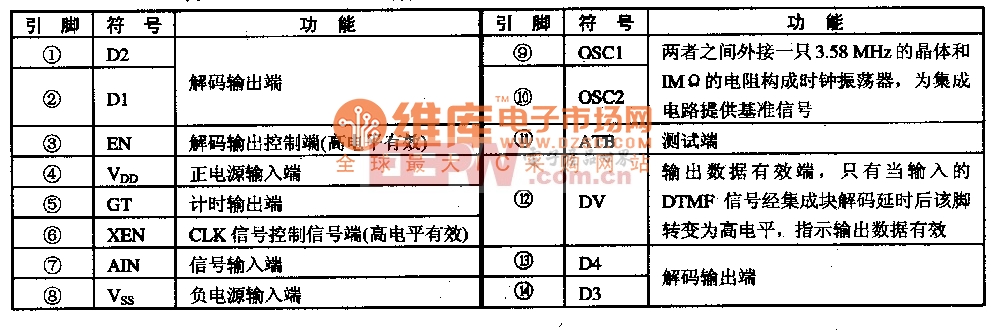
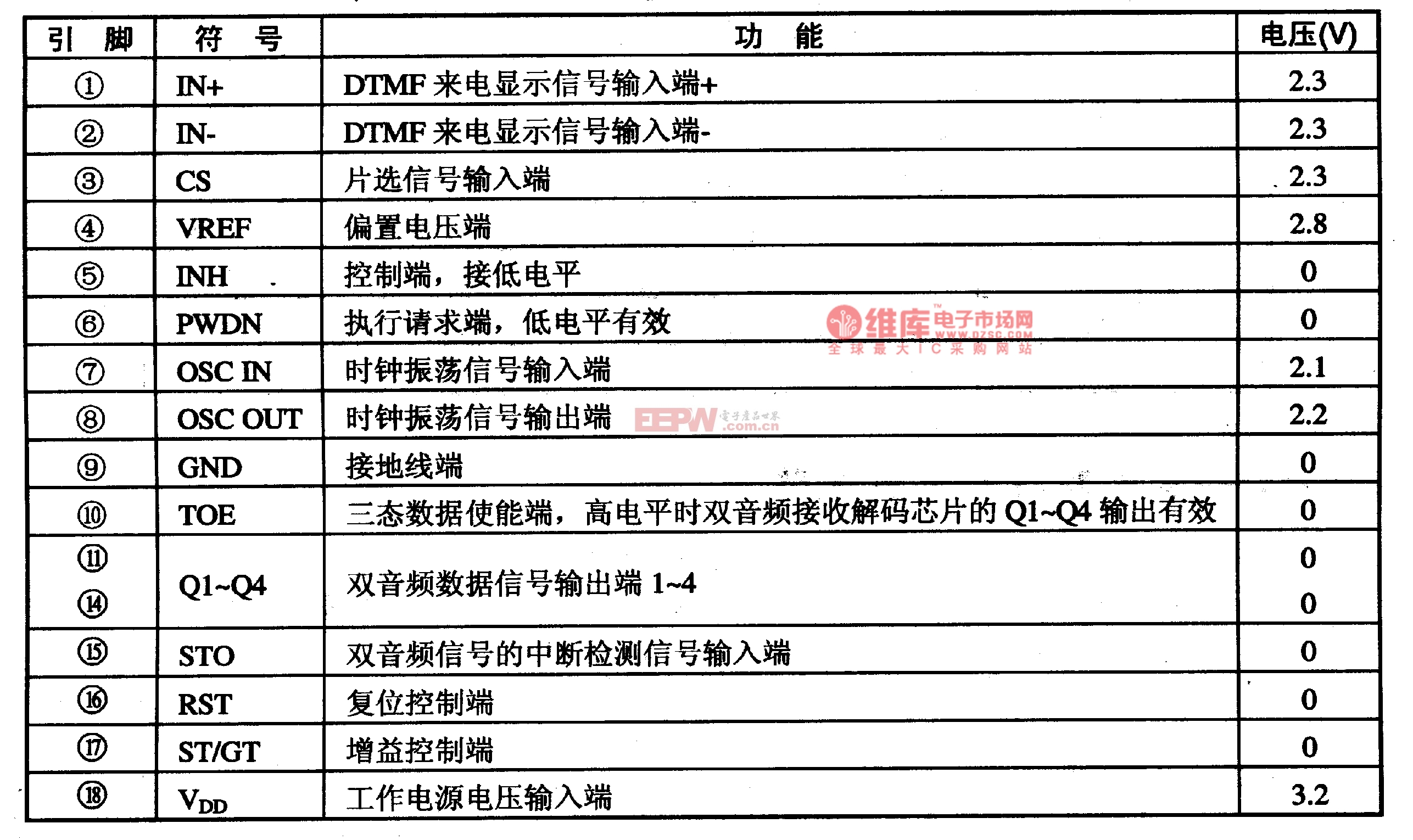
使用的DTMF解碼器IC是HT9170B(實際上使用的是一種叫做CM8870的變體,但功能是一樣的)。它有18個引腳。來自DTMF編碼器的音調被賦予DTMF解碼器IC。解碼器IC內部由運算放大器組成,其輸出被賦予預濾波器以分離低頻和高頻。然后,它被傳遞到代碼檢測器電路,并將傳入的音調解碼為4比特的二進制數據。這個數據在輸出端直接給到驅動IC,以驅動兩個電機。這些電機根據解碼后的輸出進行旋轉。
下圖顯示了對應于鍵盤上按下的按鍵的二進制解碼輸出。

DTMF解碼后的頻率輸出表
如果從手機上按下的按鍵是'8',它給出的解碼輸出是'1000'(按Q1、Q2、Q3和Q4的順序)。因此,連接到前兩個引腳(OUT1和OUT2)的電機將旋轉,第二個電機保持關閉。因此,機器人在一個方向上移動,要么向左要么向右。如果機器人要向前或向后旋轉,那么二進制值應該是'0101'或'1010'。這些值表明,兩個電機在同一方向上旋轉,即要么向前,要么向后。上表給出了在鍵盤上按下的每個按鈕的低頻、高頻和二進制輸出值。
無微控制器的DTMF控制機器人的電路圖

電路元件
DTMF解碼器IC (HT9170B 或 CM8870)
電機驅動IC (L293D或L298N)
電機
電阻器 - 100KΩ x 2, 330KΩ
電容 - 100nF x 2, 22pF x 2
水晶 - 3.58MHz
機器人底盤
電池
注意事項
如前所述,這里使用的DTMF解碼器IC是CM8870。但電路圖中提到的DTMF解碼器是HT9170B。由于引腳是一樣的,所以不會有任何問題。但請參考數據手冊。
另外,電路圖中提到馬達驅動器是L293D,但這里使用的馬達驅動器是L298N。請參考數據手冊中的引腳圖。

DTMF控制的機器人電路設計
該電路的主要部件是DTMF解碼器IC,電機驅動器IC和電機。這里使用的解碼器IC是CM8870 IC。解碼器IC的第二個引腳是一個運算放大器的反相引腳。
音調通過一系列的電容和電阻被施加到IC上。運算放大器的輸出通過IC的GS引腳進行反饋。一個外部晶體被連接到IC的第7和第8個引腳。
所用的電機驅動IC是L298N。它有15個引腳。如果你使用一個模塊,那么將解碼器IC的輸出連接到IN1, IN2, IN3和IN4。電機則連接到OUT1、OUT2和OUT3、OUT4。
如何操作基于DTMF的機器人車?
機械地安排機器人,即把輪子和馬達連接起來,把電路放在機器人上,并把手機固定在上面。
現在用你的手機按'5',機器人開始向前移動。
現在從你的手機上按下'0',機器人開始向后移動。
現在按'2'鍵,機器人向左旋轉。
現在按'8'可以使機器人向右旋轉。
DTMF控制的機器人車輛電路應用
經過輕微修改的DTMF機器人可以用于工業應用中。
帶有人體探測傳感器的DTMF機器人可以在地震等災害發生時用來探測建筑物下的人。
帶有攝像頭的DTMF機器人可以用于監控系統。
DTMF控制的機器人車輛的局限性
如果在沒有信號的情況下與另一個手機一起操作,DTMF機器人可能無法正常工作。
只能使用具有特殊插口的手機。












評論