智能車速度控制系統設計與實現

系統建模
本文引用地址:http://www.104case.com/article/96106.htm一個針對實際對象的控制系統設計,首先要做的就是對執行器及系統進行建模,并標定系統的輸入和輸出。為了對車速控制系統設計合適的控制器,就要對速度系統進行定階和歸一化[2]。對此,分別設計了加速和減速模型測定實驗。通過加裝在車模后輪軸上的光電編碼器測量電機轉速。編碼器齒輪與驅動輪的齒數比為33/76,編碼器每輸出一個脈沖對應智能車運動1.205mm。車模可以通過調節加給電機的PWM波的占空比進行調速。單片機上的PWM模塊可以是8位或16位的,為了提高調速的精度,電機調速模塊選用16位PWM,其占空比調節范圍從0到65535,對應電機電樞電壓從0%到100%的電池電壓。
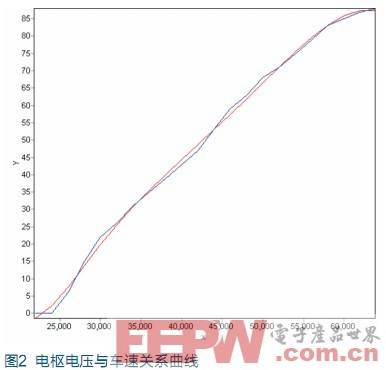
將車模放置在一段長直跑道上,采用開環方式給驅動電機加上不同的電壓,記錄車模在速度進入穩定后的速度值。然后將所測得的電樞電壓與車速進行擬合的曲線如圖2所示,由圖1可將智能車加速模型近似為線性模型。













評論