攝像頭黑線識別算法和賽車行駛控制策略

但是對于比賽來說,賽道是在白色底板上鋪設黑色引導線,因此它的干擾信息會少很多。所以對于比賽的黑線檢測來說40 行已經太多了:只要在單行上有足夠多的信息點,較少的行數就可以實現對黑線的檢測;在綜合了實踐比對之后,最終方案決定采用10 行的信息來判斷前方是直道還是彎道。
本文引用地址:http://www.104case.com/article/95519.htm前面主要簡單介紹了單板攝像頭的信號特點,以及用于控制算法處理的原始圖像信息。并且進一步通過實驗決定了最終黑線提取算法所需要采用的圖像信息行數;接下來將詳細分析和研究黑線提取算法以及通過該算法來進行速度和轉向控制。
單行黑線提取算法
前面提到了攝像頭圖像信息的特點,接下來將結合比賽賽道的圖像特點來提出相應的黑線提取算法-邊沿檢測算法。由于比賽賽道是在白色底板上鋪設黑色引導線,因此干擾比較小,黑線提取較為容易。很自然的就想到了圖像處理算法中較為簡單的邊界提取算法。由于黑色賽道和白色底板之間的色差較大,直接反映在圖像數據中就是大于一個黑白色閥值。通過實驗可以基本上確定該閥值的大小,根據現場光線的變化影響會有略微的變化。但是該閥值基本上介于22-30 之間。因為可以通過判斷相鄰數據點的差是否大于該閥值,作為邊沿提取算法的依據和主要參數。
該算法的主要過程為:
1, 從最左端的第一個有效數據點(12)開始依次向右進行
閥值判斷:由于實際中黑白賽道邊沿可能會有模糊偏差,導致閥值并不是簡單的介于相鄰的兩個點之間,很可能要相隔兩個點(參考圖2)。因此:
2,第line 為原點,判斷和line+3 的差是否大于閥值,如果是則將line+3 記為i,從i 開始判斷在接下來的從i+3 到該行最末一個點之間的差值是否大于閥值,如果大于則將line+i/2+2 的坐標賦值給黑線中心位置(參考圖4)。
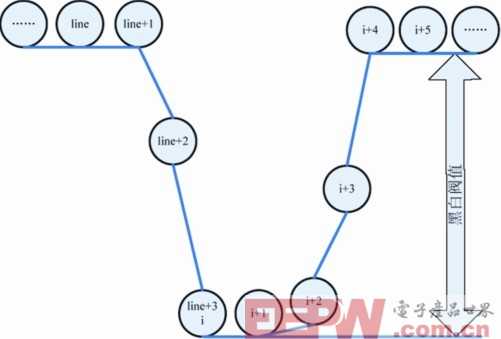
圖4 單行黑線提取算法












評論