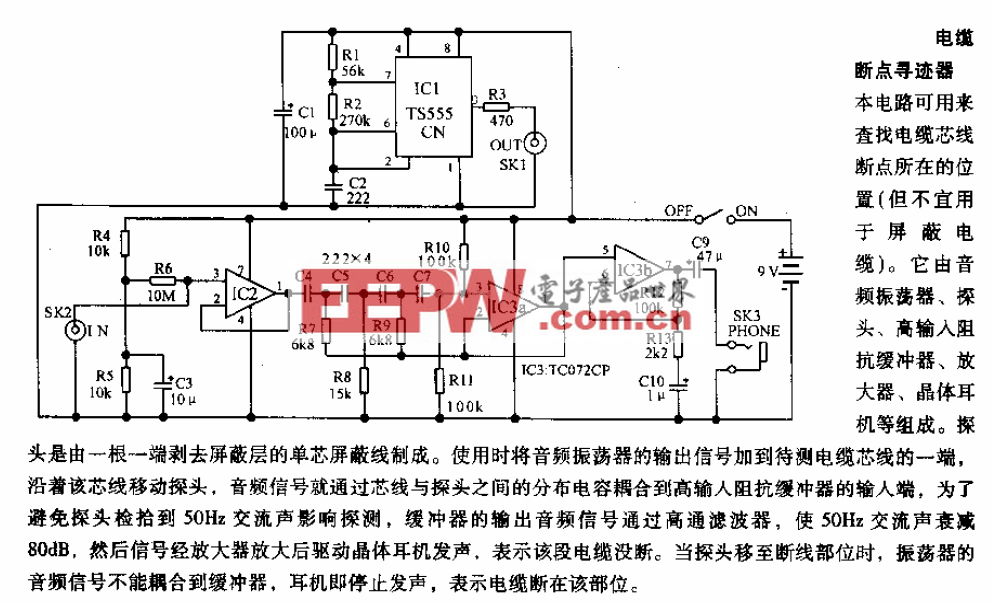
智能尋跡小車

摘要: 本文介紹了一種基于51單片機的小車尋跡系統。該系統采用兩組高靈敏度的光電對管,對路面黑色軌跡進行檢測,并利用單片機產生PWM波,控制小車速度。測試結果表明,該系統能夠平穩跟蹤給定的路徑。
關鍵詞: 智能小車;光電對管;尋跡;脈沖寬度調制
在歷屆全國大學生電子設計競賽中多次出現了集光、機、電于一體的簡易智能小車題目。筆者通過論證、比較、實驗之后,制作出了簡易小車的尋跡電路系統。整個系統基于普通玩具小車的機械結構,并利用了小車的底盤、前后輪電機及其自動復原裝置,能夠平穩跟蹤路面黑色軌跡運行。
總體方案
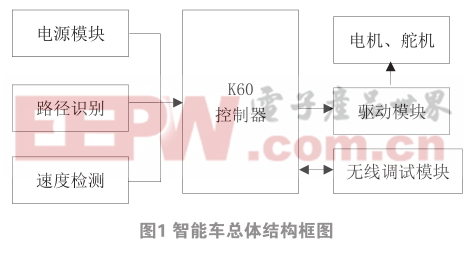
整個電路系統分為檢測、控制、驅動三個模塊。首先利用光電對管對路面信號進行檢測,經過比較器處理之后,送給軟件控制模塊進行實時控制,輸出相應的信號給驅動芯片驅動電機轉動,從而控制整個小車的運動。系統方案方框圖如圖1所示。
![]()
圖1 智能小車尋跡系統框圖
傳感檢測單元
小車循跡原理
該智能小車在畫有黑線的白紙 “路面”上行駛,由于黑線和白紙對光線的反射系數不同,可根據接收到的反射光的強弱來判斷“道路”—黑線。筆者在該模塊中利用了簡單、應用也比較普遍的檢測方法——紅外探測法。
紅外探測法,即利用紅外線在不同顏色的物理表面具有不同的反射性質的特點。在小車行駛過程中不斷地向地面發射紅外光,當紅外光遇到白色地面時發生漫發射,反射光被裝在小車上的接收管接收;如果遇到黑線則紅外光被吸收,則小車上的接收管接收不到信號。
傳感器的選擇
市場上用于紅外探測法的器件較多,可以利用反射式傳感器外接簡單電路自制探頭,也可以使用結構簡單、工作性能可靠的集成式紅外探頭。ST系列集成紅外探頭價格便宜、體積小、使用方便、性能可靠、用途廣泛,所以該系統中最終選擇了ST168反射傳感器作為紅外光的發射和接收器件,其內部結構和外接電路均較為簡單,如圖2所示:
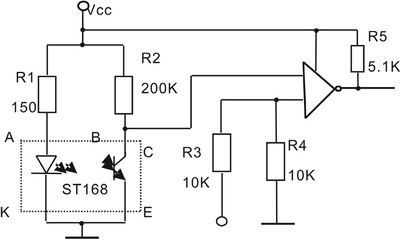
圖2 ST168檢測電路
ST168采用高發射功率紅外光、電二極管和高靈敏光電晶體管組成,采用非接觸式檢測方式。ST168的檢測距離很小,一般為8~15毫米,因為8毫米以下是它的檢測盲區,而大于15毫米則很容易受干擾。筆者經過多次測試、比較,發現把傳感器安裝在距離檢測物表面10毫米時,檢測效果最好。
R1限制發射二極管的電流,發射管的電流和發射功率成正比,但受其極限輸入正向電流50mA的影響,用R1=150的電阻作為限流電阻,Vcc=5V作為電源電壓,測試發現發射功率完全能滿足檢測需要;可變電阻R2可限制接收電路的電流,一方面保護接收紅外管;另一方面可調節檢測電路的靈敏度。因為傳感器輸出端得到的是模擬電壓信號,所以在輸出端增加了比較器,先將ST168輸出電壓與2.5V進行比較,再送給單片機處理和控制。
傳感器的安裝
正確選擇檢測方法和傳感器件是決定循跡效果的重要因素,而且正確的器件安裝方法也是循跡電路好壞的一個重要因素。從簡單、方便、可靠等角度出發,同時在底盤裝設4個紅外探測頭,進行兩級方向糾正控制,將大大提高其循跡的可靠性,具體位置分布如圖3所示。
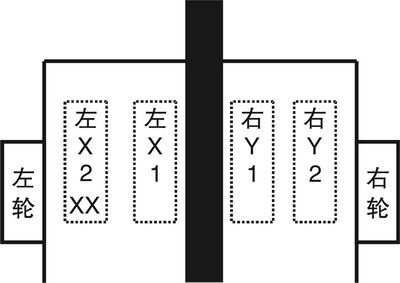
圖3 紅外探頭的分布圖
圖中循跡傳感器全部在一條直線上。其中X1與Y1為第一級方向控制傳感器,X2與Y2為第二級方向控制傳感器,并且黑線同一邊的兩個傳感器之間的寬度不得大于黑線的寬度。小車前進時,始終保持(如圖3中所示的行走軌跡黑線)在X1和Y1這兩個第一級傳感器之間,當小車偏離黑線時,第一級傳感器就能檢測到黑線,把檢測的信號送給小車的處理、控制系統,控制系統發出信號對小車軌跡予以糾正。第二級方向探測器實際是第一級的后備保護,它的存在是考慮到小車由于慣性過大會依舊偏離軌道,再次對小車的運動進行糾正,從而提高了小車循跡的可靠性。









評論